

Route planning method applied to rotor UAV
A rotorless unmanned and unmanned aerial vehicle technology, applied in the field of remote sensing mapping and aerial photography, can solve the problem of not considering route planning, not considering the movement path and reachable area of a single operator, not considering the reachable operation route of the operator and Work efficiency optimization and other issues to achieve the effect of reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
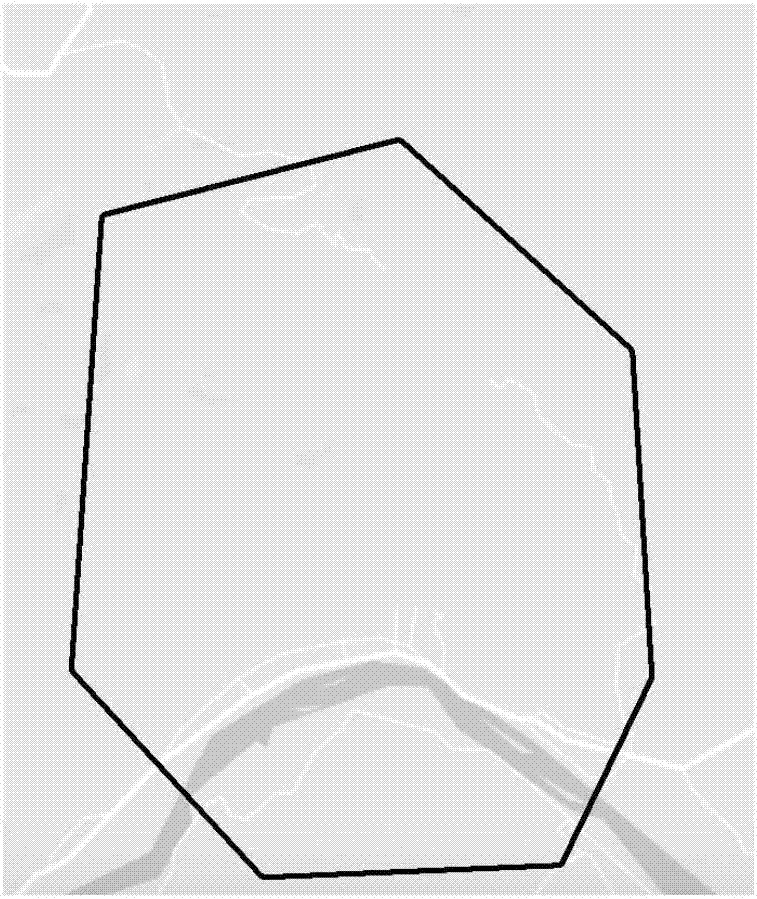
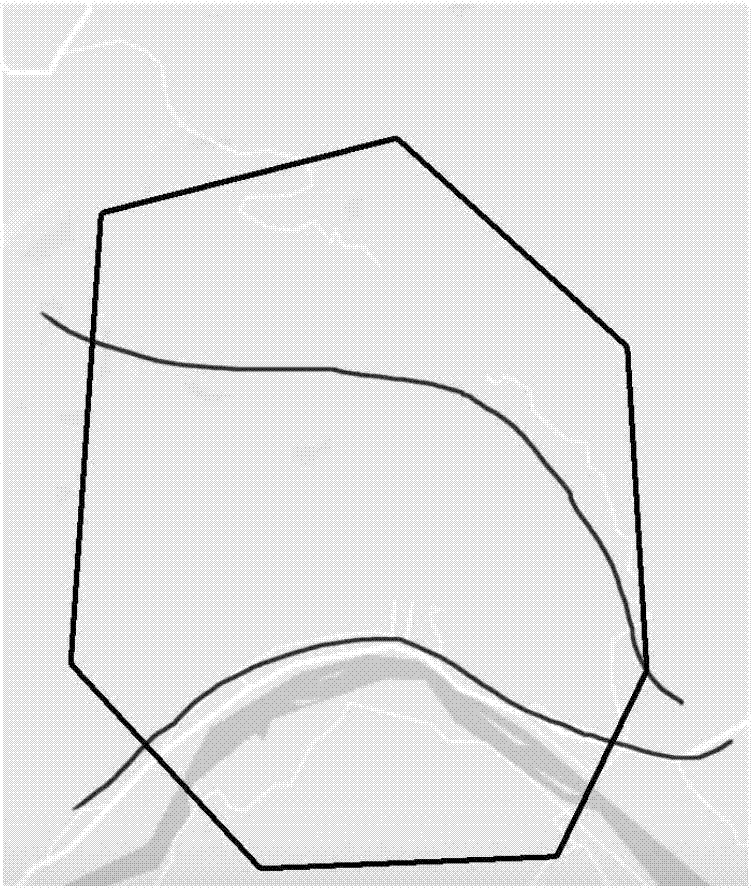
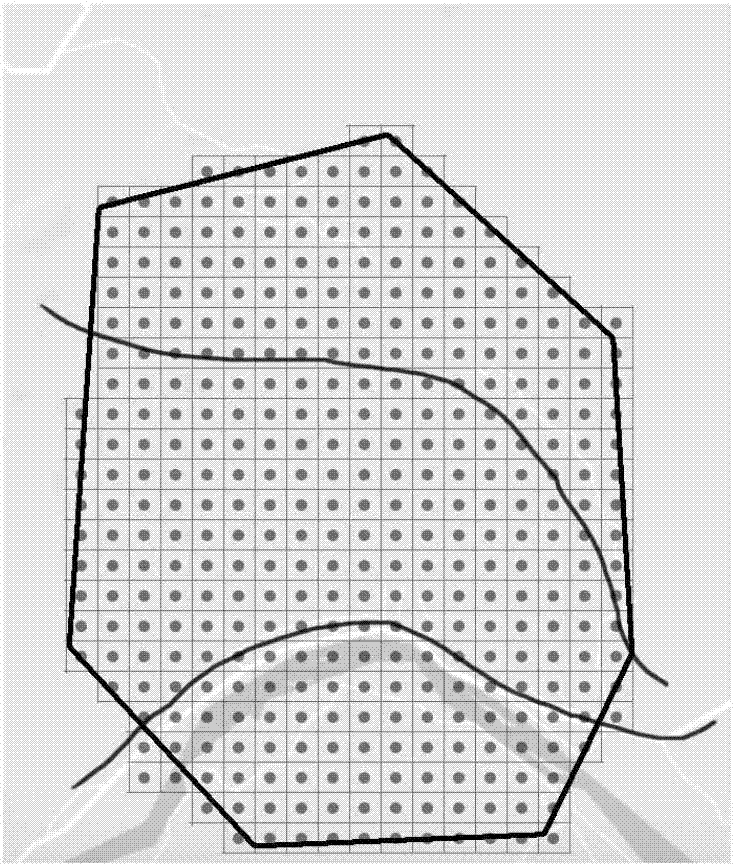
[0040] Reference attached Figure 1-4 As shown, a large area segmented route planning method of the present invention applied to rotary wing drones specifically divides a user-specified area into several grids according to the coverage of a single image and the required overlap rate. Each grid contains an image collection point; the maximum number of image collection points for a single voyage is calculated according to the drone's single endurance; the operating route of the drone operator is automatically generated according to the user's delineation or algorithm. The route selects the take-off point and the landing point; the entire area is automatically divided into multiple flight routes according to the maximum number of image acquisition points in a single time and the total number of grids contained in the entire area; multiple routes are automatically grouped according to the number of flight groups entered by the user.
[0041] In this embodiment, it specifically includ...
Embodiment 2
[0070] As a further improvement of Example 1, refer to Figure 5 As shown, the algorithm divides the flight routes into W flight route groups according to the number of UAV operators W. Generally, all flight operations of each flight route group are performed by the same drone operator. In order to reduce the transition and movement of drone operators, the flight routes are grouped according to the operating route, and the algorithm ensures that the take-off and landing points of the same group of flight routes are located on the same operating route.
[0071] In this embodiment, according to the number of route groups W and the operation routes input by the user, the operation routes of different route groups may be the same or different. Reference attached Figure 5 It can be seen that, in this embodiment, there are two groups of route groups, group A and group B.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More