

Water surface automatic tracking and monitoring system for underwater vehicle
A technology of underwater vehicle and monitoring system, which is applied to the control of finding targets, radio wave measurement system, satellite radio beacon positioning system, etc. It can solve problems such as inability to work, limited measurement distance, expensive price, etc., and achieve improved positioning Accuracy, improving accuracy, and ensuring the effect of positioning range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The embodiments of the present invention will be described in detail below, and the examples of the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
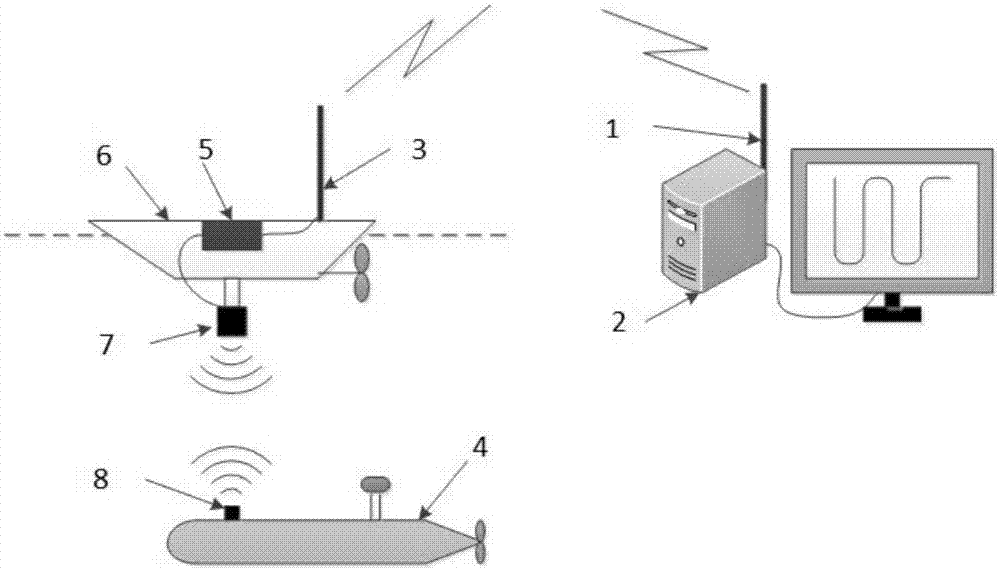
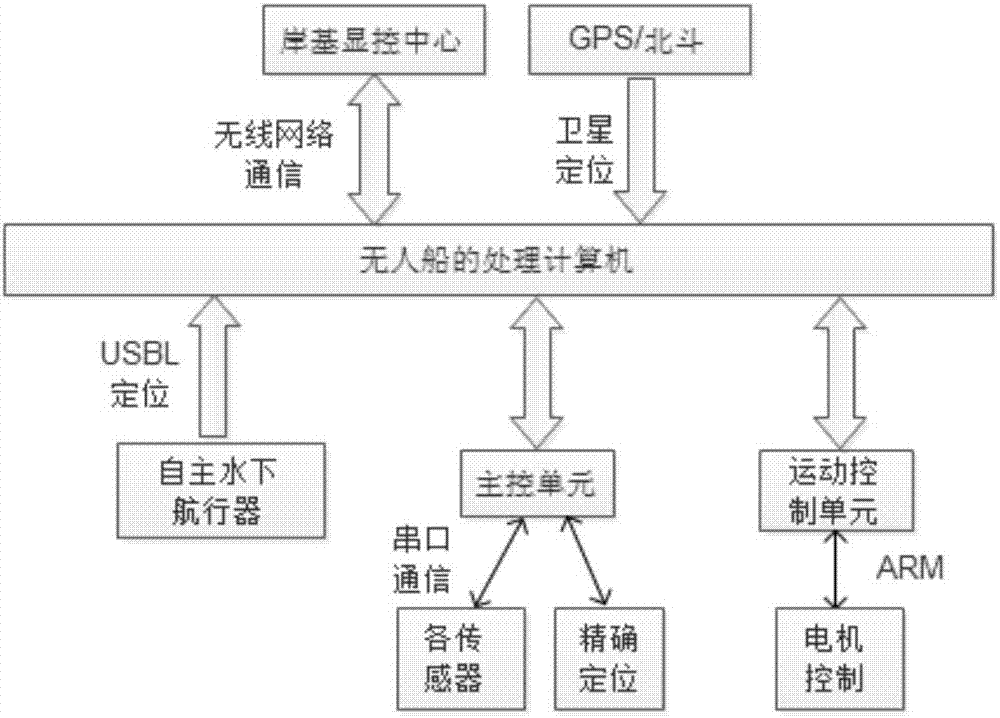
[0025] A water surface automatic tracking and monitoring system for underwater vehicles in this embodiment includes a shore-based display and control center, a wireless network communication system, an unmanned ship tracking platform and an underwater acoustic positioning system.
[0026] The unmanned ship tracking platform uses the underwater acoustic positioning system to obtain the relative position of the underwater vehicle, and combines the position of the unmanned ship tracking platform obtained by the satellite positioning system on the unmanned ship tracking platform to determine the position of the underwater vehicle. And send the unmanned ship tracking platform's own position and the position of the underwater vehicle to the sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More