

Communications among water environment mobile robots
A technology for surface robots and underwater robots, which is applied to instruments, vehicles, underwater ships, etc., can solve the problems that data cannot be effectively received from robots, and robots cannot be effectively controlled.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
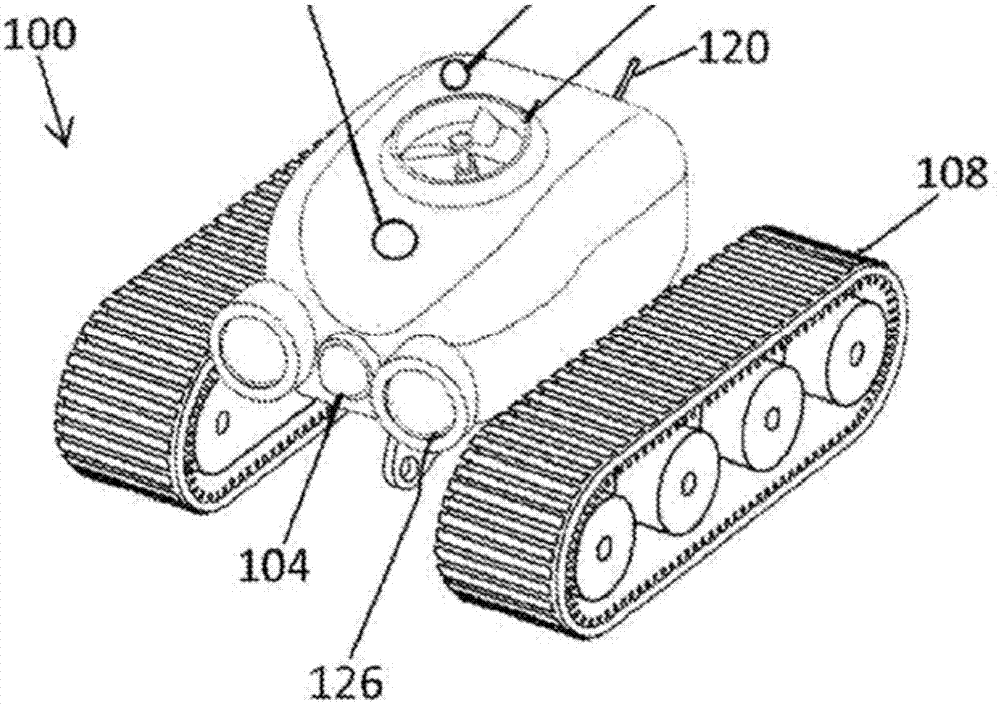
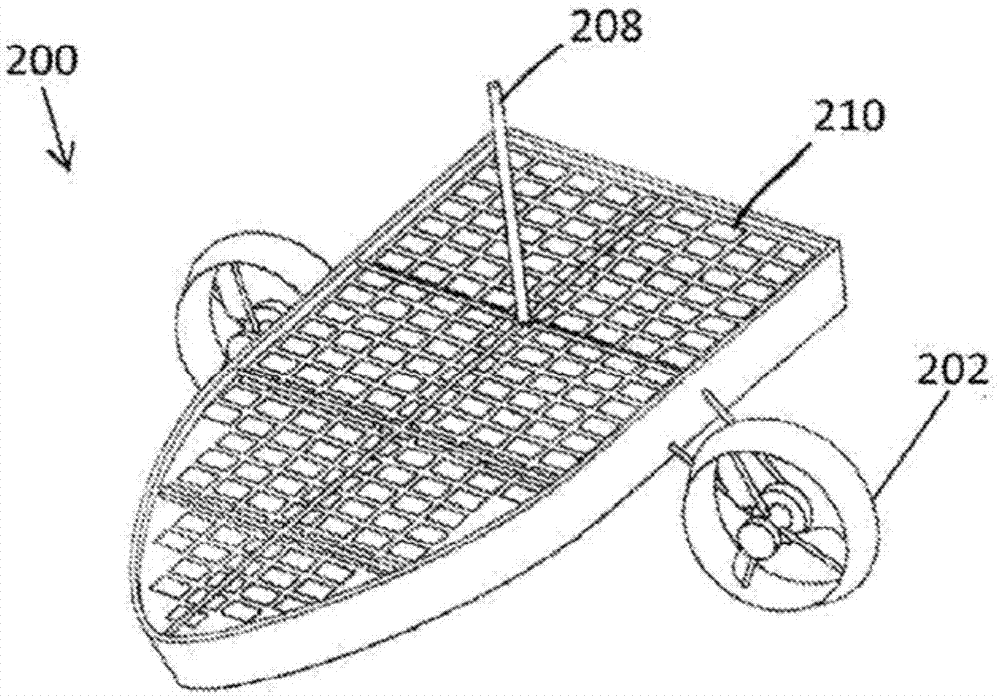
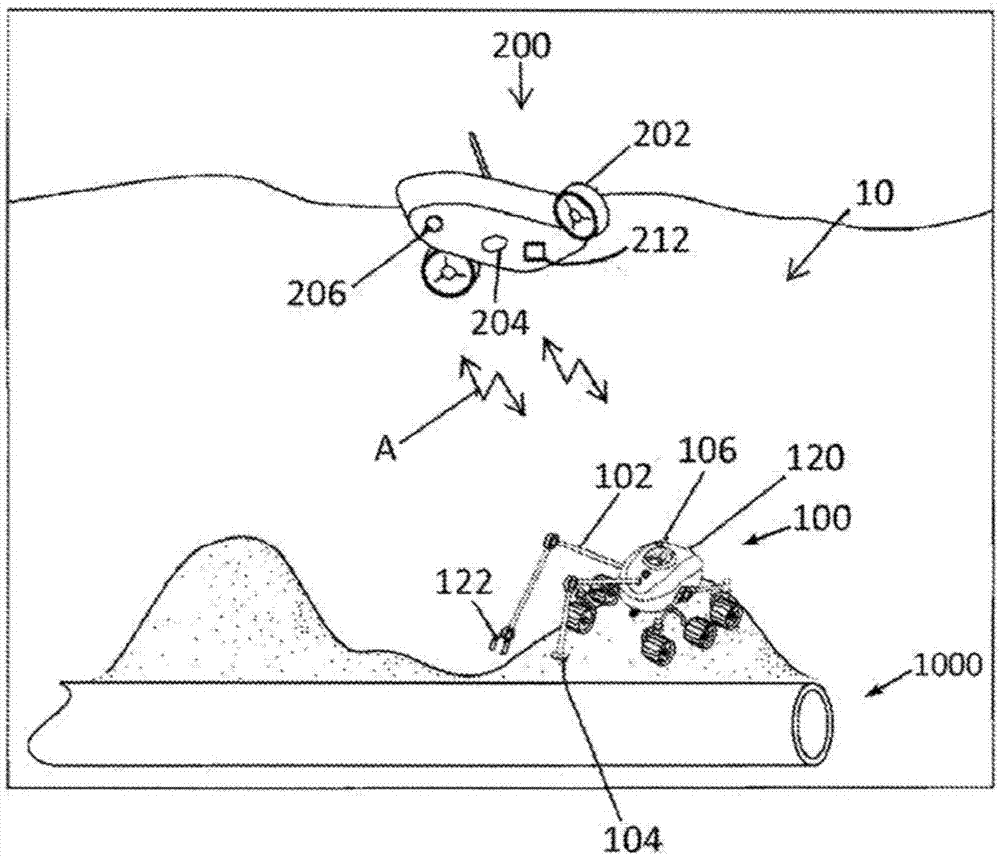
[0028] see Figure 1-3 , the underwater environment robot system 10 includes an underwater robot 100 and a surface robot 200 . The underwater robot 100 is structurally configured such that it can dive below the water surface and perform various maintenance and inspection operations on underwater infrastructure. The surface robot 200 remains on the surface of the water and has its own propulsion system 202 so that it can move along the water surface in order to remain close to the underwater vehicle 100 . As the underwater vehicle 100 moves underwater, the surface robot 200 moves in a corresponding manner in order to maintain proximity to the underwater vehicle. Since the surface robot 200 moves to a position close to the underwater robot 100, the distance between the two robots is kept to a minimum. Thus, the distance for communicating through water between the surface robot 200 and the underwater robot 100 is minimized. It is very beneficial to minimize the communication d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More