

Automated mechanical arm capable of performing clamping steadily
A manipulator and stable technology, applied in the field of manipulators, can solve problems such as unsteady clamping, achieve stable grasping and ensure uniformity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
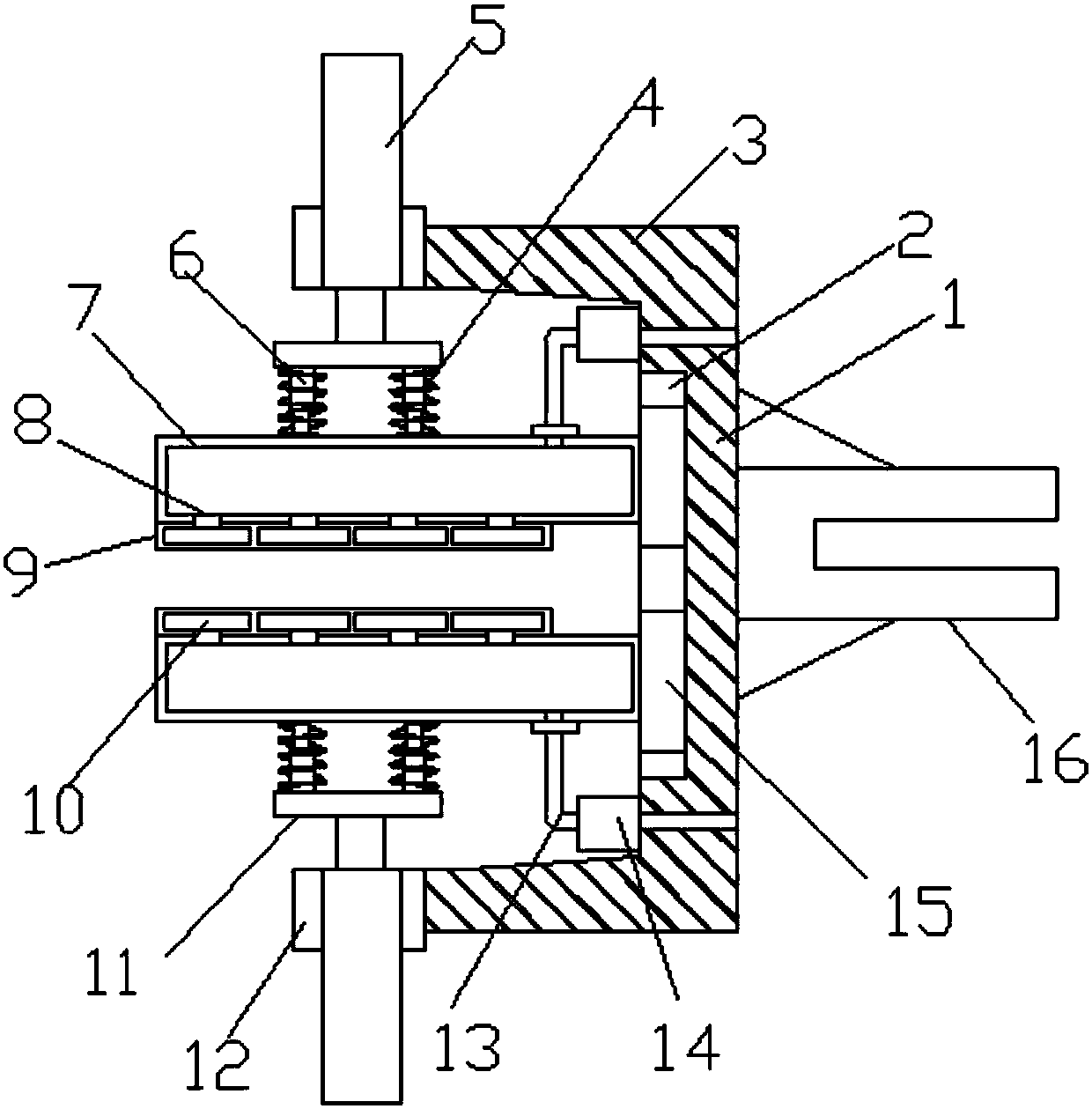
[0016] refer to figure 1 , an automated manipulator for stable clamping, comprising a base 1, a connecting rod 16 connected to one side of the base 1, clamping arms 3 vertically connected to both sides of the base 1, the clamping arms 3 are far away from the base 1 One end is provided with a mounting seat 12, and the mounting seat 12 is provided with a clamping hydraulic cylinder 5 parallel to the base 1. The side of the two clamping hydraulic cylinders 5 close to each other is connected with a clamping cylinder perpendicular to the base 1 through a connecting mechanism. plate 7. The connecting rod 16 is used to connect with the driving mechanism, which is convenien...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More