

Driving scene classification method based on convolution neural network
A convolutional neural network and driving scene technology, applied in the field of self-driving cars, can solve problems such as difficult feature extraction, large distances, and complex traffic scenes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The main purpose of the present invention is to invent a driving scene classification method based on convolutional neural network, aiming to realize the automatic identification and classification of the road environment when the vehicle is driving, that is, the vehicle can continuously perceive and judge the surrounding driving scene information during the driving process The method enables vehicles to pass through the corresponding road environment more safely and efficiently.
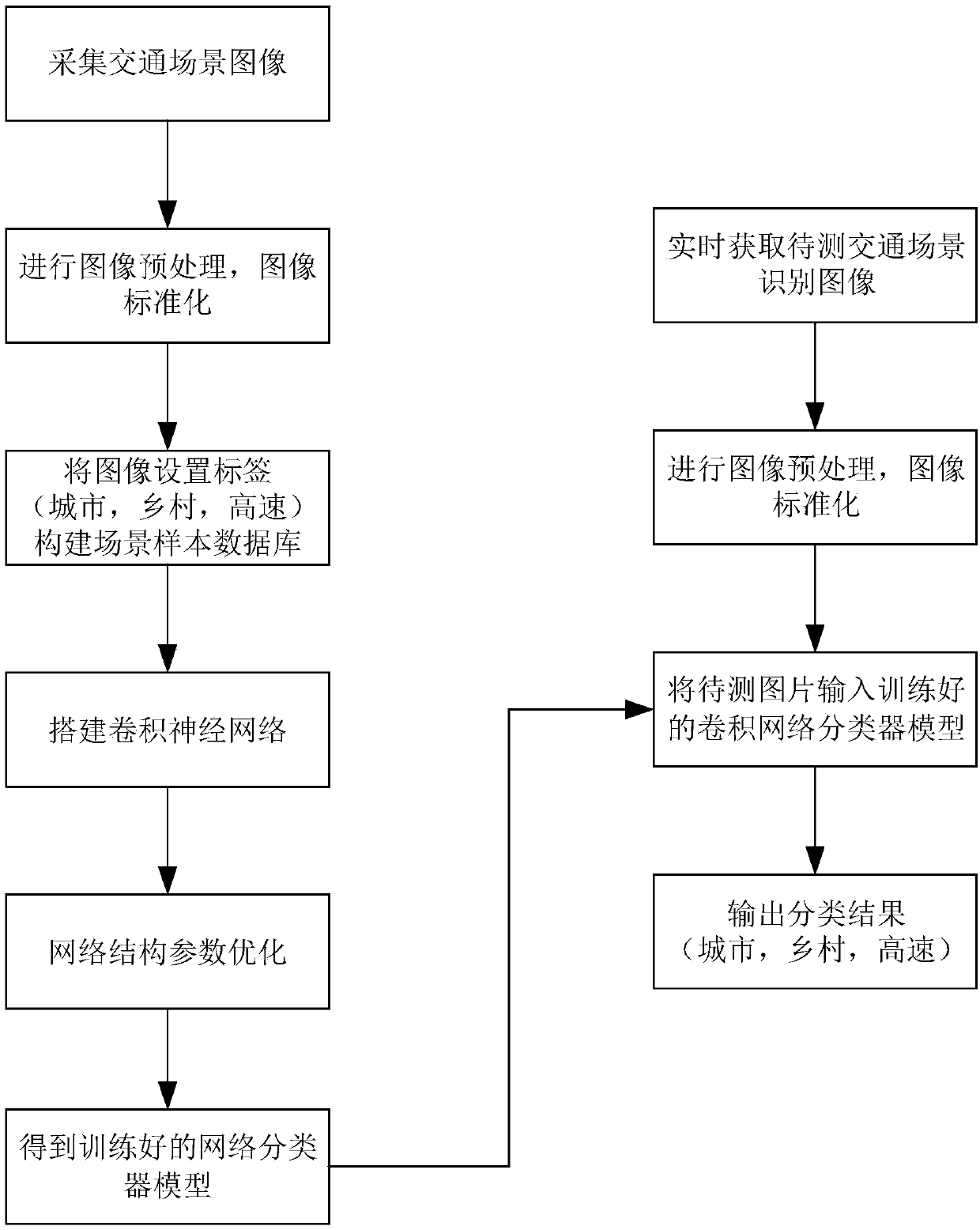
[0026] In order to achieve the above object, a kind of driving scene classification method based on convolutional neural network provided by the present invention comprises the following steps:
[0027] Step 1, road environment video image acquisition, using the vehicle-mounted camera to obtain road environment images in front of and around the vehicle during vehicle driving;
[0028] Step 2, classifying traffic scenes and establishing a traffic scene identification database;
[0029] Use th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More