Manipulating device of retractable bow rudder
A control device, retractable technology, used in transportation and packaging, ships, special-purpose ships, etc., can solve the problems of small effective space at the bow, lack of design experience, backward device research, etc., to achieve small clearance and improve maneuverability. , to meet the effect of operating requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the public implementation manners of the present invention in detail with reference to the accompanying drawings.
[0045] The retractable bow rudder control device described in the present invention is the first application on an underwater submersible. The advantages.
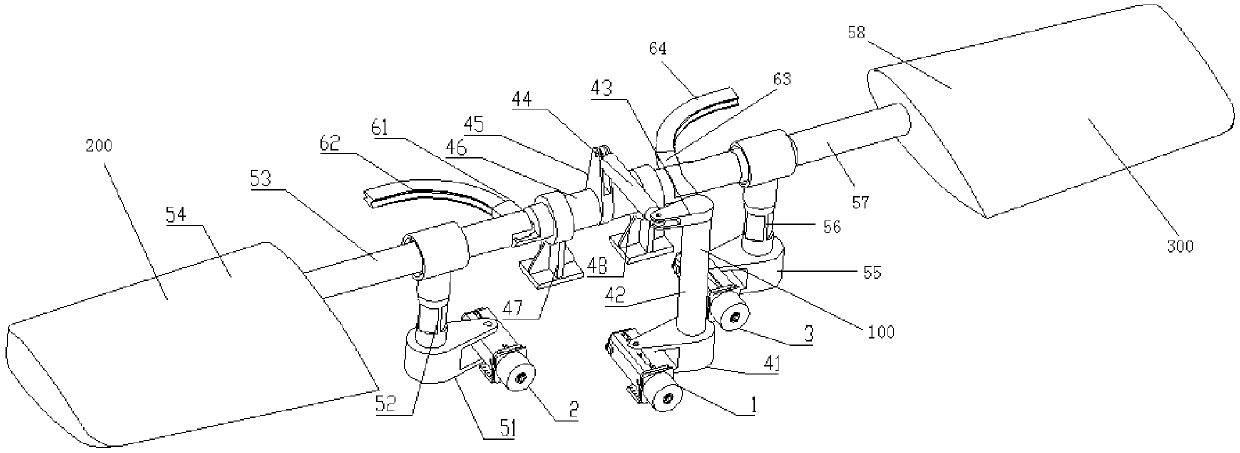
[0046] refer to figure 1 , shows a schematic structural view of a retractable bow rudder control device in an embodiment of the present invention. Among them, the X axis, Y axis and Z axis are defined: the direction where the rudder axis 46 is located is the direction where the X axis is located, the direction where the rotary axis 42 is located is the direction where the Z axis is located, and the direction where the axis of the rudder steering gear 1 is located is the direction where the Y axis is located .
[0047] like figure 1 , the control device of the retract...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com