

Controllable mechanism type drilling robot
A robot and mechanism technology, applied in drilling/drilling equipment, program-controlled manipulators, manipulators, etc., can solve the problems of difficult to meet high-speed and high-precision positioning, poor mechanism dynamic performance, joint error accumulation, etc., and achieve stiffness and weight. The effect of large ratio, large motion space and small error accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
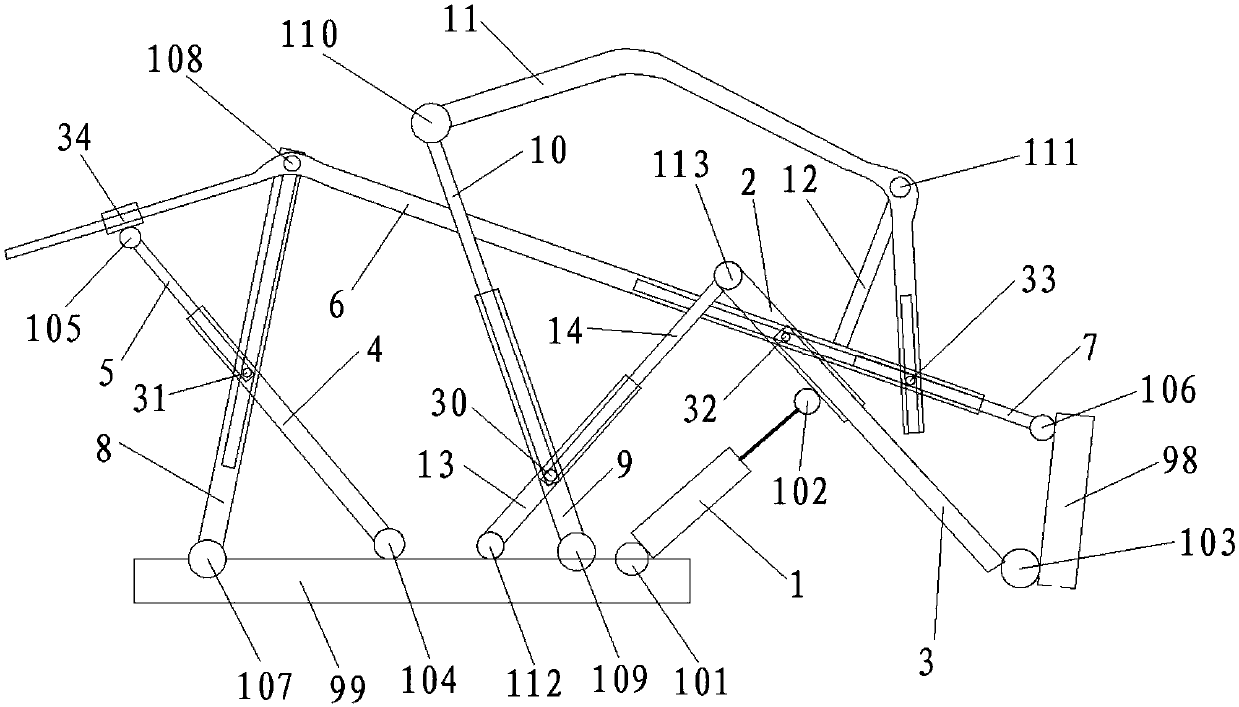
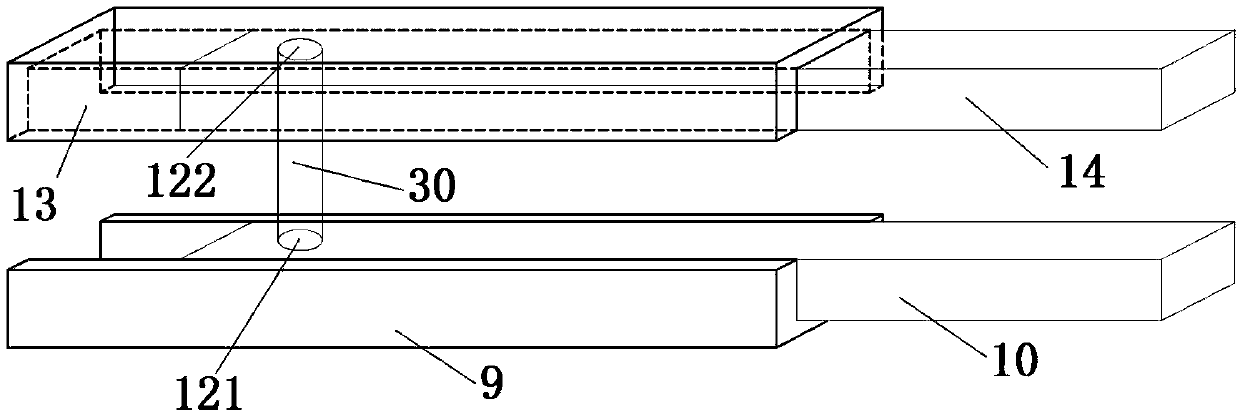
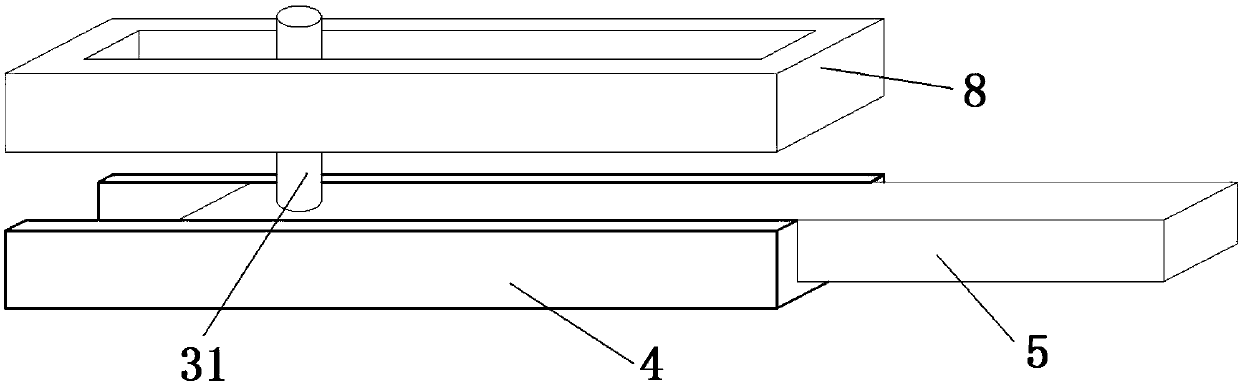
[0031] Controllable mechanism drilling robot, including pole one 1, pole two 2, pole three 3, pole four 4, pole five 5, pole six 6, pole seven 7, pole eight 8, pole nine 9, pole ten 10, pole Eleven 11, rod twelve 12, rod thirteen 13, rod fourteen 14, shaft rod 30, first cylindrical pin 31, second cylindrical pin 32, third cylindrical pin 33, sliding sleeve 34, actuator 98 and machine Rack 99,
[0032] One end of the rod ten 10 three 13 is connected to the frame 99 through the rotating pair twelve 112, the other end of the rod ten 10 three 13 is connected with one end of the rod fourteen 14 through the axial movement pair to form a telescopic rod, and the other end of the rod fourteen 14 is rotated Pair 13 113 is connected to one end of rod 2 2, the other end of rod 2 2 is connected to one end of rod 3 3 through an axial movement pair to form a telescopic rod, the other end of rod 3 3 is connected to actuator 98 through rotating pair 3 103, and one end of the oil cylinder It i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More