

A 3D Free Bending Forming Method for Complex Components Based on Multi-legged Parallel Robot
A bending forming and robot technology, applied in the field of three-dimensional free bending forming of complex components based on multi-legged parallel robots, achieves the effect of strong bearing capacity, small error accumulation, simple and feasible method
Active Publication Date: 2018-08-14
NANJING UNIV OF AERONAUTICS & ASTRONAUTICS
View PDF4 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The existing three-dimensional free bending system for pipes cannot quickly and accurately form large-size thick-walled pipes
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
Embodiment 2
Embodiment 3
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
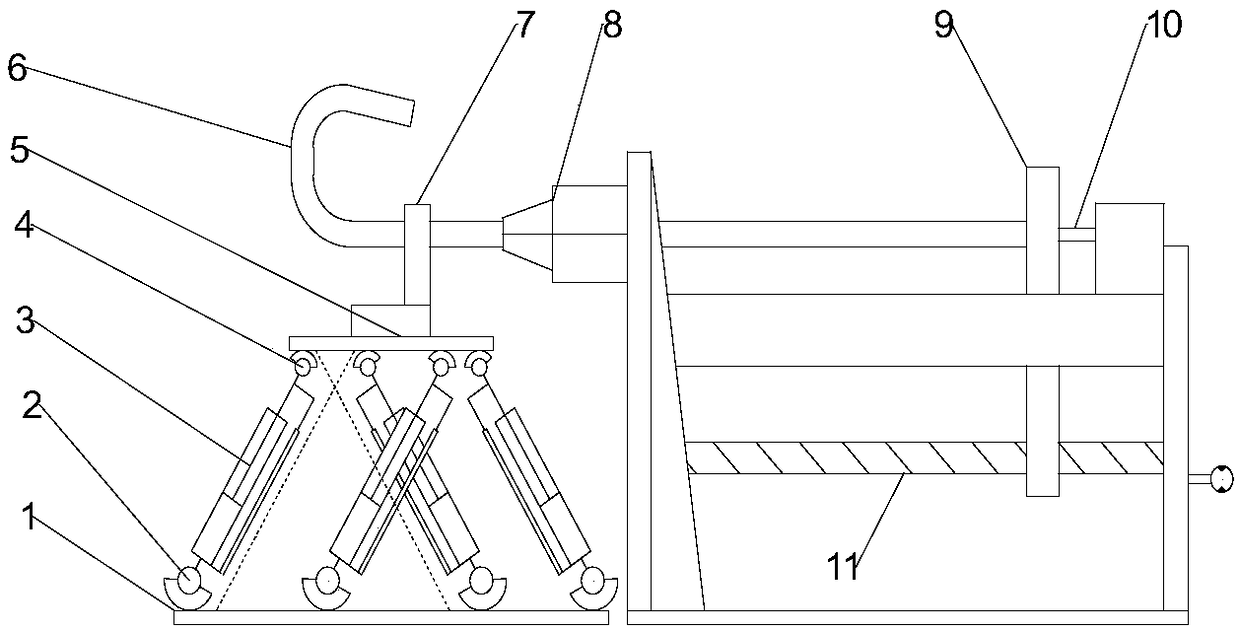
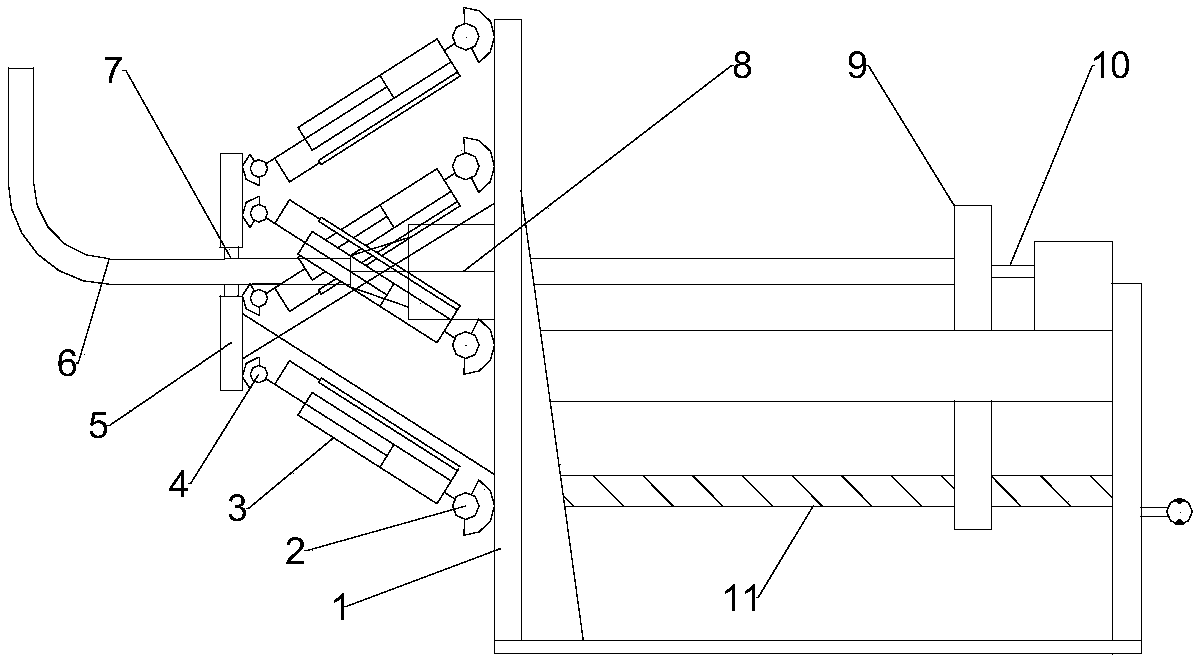
The invention discloses a complex component three-dimensional free bending forming method based on a multi-legged parallel robot. The method is characterized in that an adopted bending die moving device comprises a fixed platform, end executors and multiple driving rods, wherein the multiple driving rods are arranged between the end executors and the fixed platform and used for controlling movement of the end executors in space; a bending die moving platform is directly driven by a six-degree-of-freedom parallel mechanism or is driven in a serial-parallel mixed driving mode. The advantages of large rigidity weight ratio, high bearing capacity, small error accumulation, good dynamic performance, compact structure, low overall manufacturing cost and the like of the parallel mechanism are given full play to. The forming precision of three-dimensional free bending is improved. The problem that large-size thick-walled pipe fittings are hard to form through three-dimensional free bending is solved.
Description
technical field The invention belongs to the technical field of advanced manufacturing of metal complex components, in particular to a three-dimensional free bending forming method of complex components based on a multi-legged parallel robot. Background technique Metal complex components with various cross-sectional shapes are widely used in many fields such as aerospace, nuclear power, automobiles, ships, petrochemicals, construction and other civil industries, and play an important role in reducing the production cost and weight of products. Large-size thick-walled tubes have high strength and good pressure and bending resistance. They are mainly used as petroleum geological drilling tubes, cracking tubes for petrochemicals, boiler tubes, bearing tubes, and high-precision structural tubes for automobiles, tractors, and aviation. The three-dimensional free bending method of complex components can realize high-precision moldless forming of pipes, profiles, and wires under va...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B21D7/12
CPCB21D7/12
Inventor郭训忠熊昊王辉马燕楠陶杰徐勇
OwnerNANJING UNIV OF AERONAUTICS & ASTRONAUTICS