

Multi-degree-of-freedom industrial robot mechanism
A technology of industrial robots and degrees of freedom, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of heavy arm weight, difficult installation volume, poor dynamic performance of mechanisms, etc., and achieve good dynamic performance and stiffness-to-weight ratio The effect of large and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
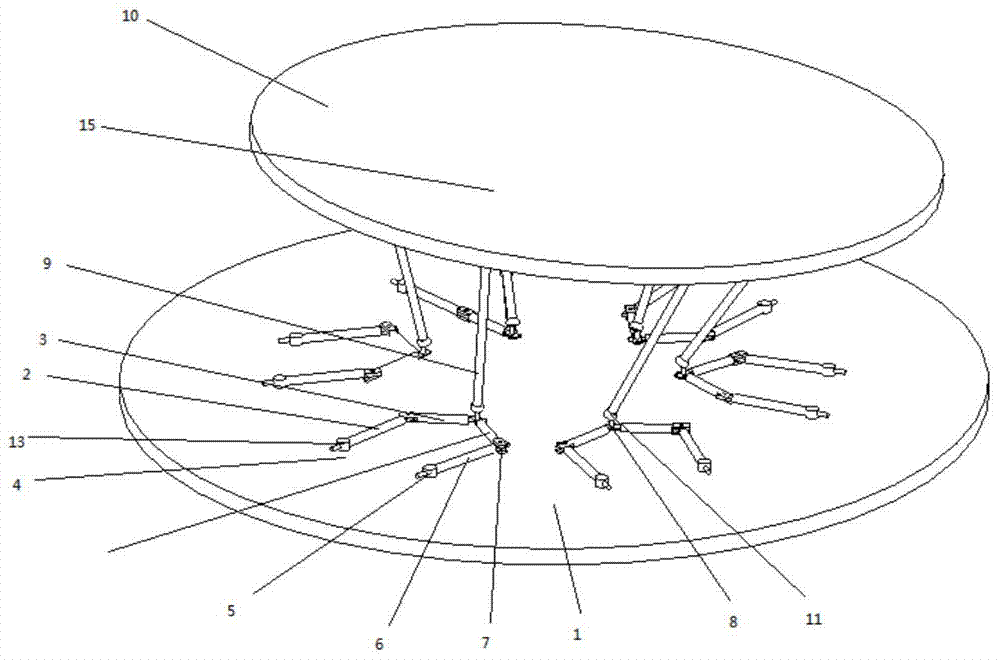
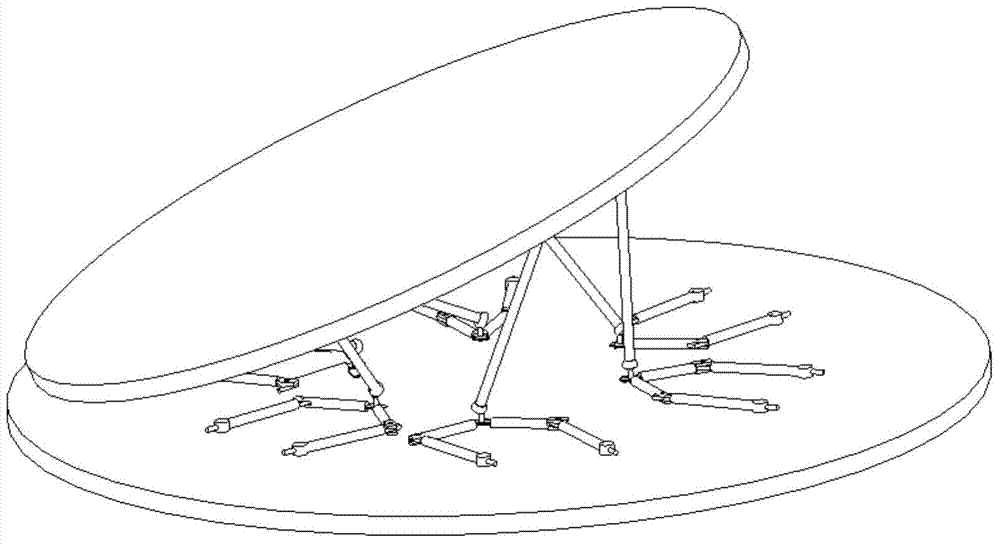
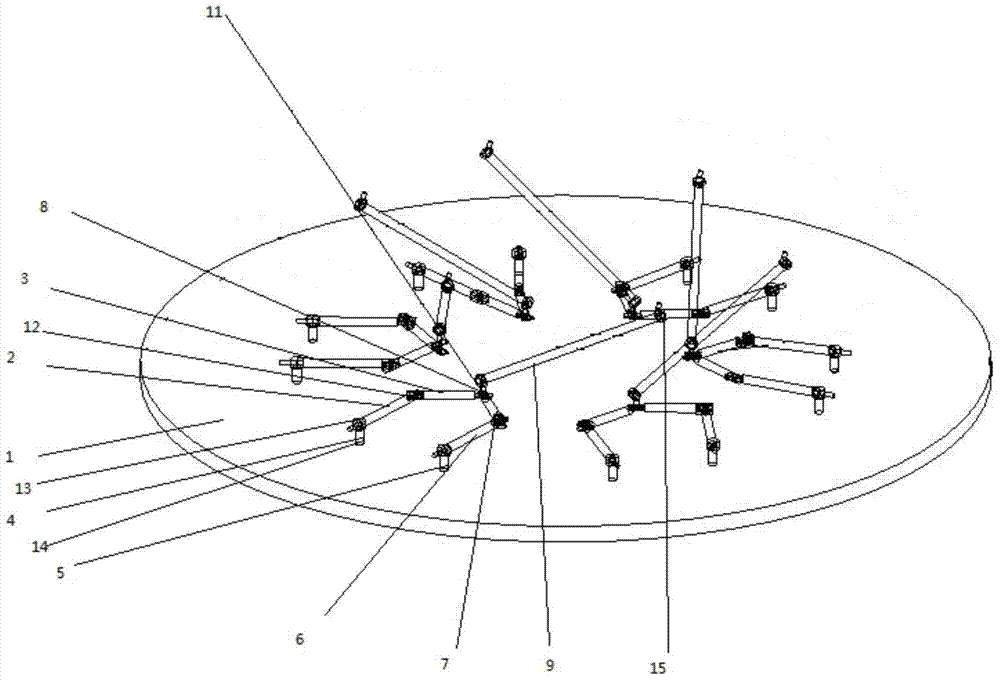
[0018] The multi-degree-of-freedom industrial robot mechanism includes a frame 1, a moving platform 10, and at least one linkage mechanism, and the linkage mechanism includes a first rotating hinge support 4, a first linkage 2, a second linkage 3, a third linkage Connecting rod 7, fourth connecting rod 6, second rotating hinge support 5, first spherical hinge support 8 and fifth connecting rod 9;
[0019] The lower end of the first rotating hinge support 4 is connected to the frame 1 through the first rotating pair 14, and one end of the first connecting rod 2 is connected to the upper end of the first rotating hinge supporting seat 4 through the second rotating pair 13, and the first connecting rod 2 is connected to the upper end of the first rotating hinge supporting seat 4 through the second rotating pair 13. One end is connected to one end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More