

Space non-cooperative target three-dimensional reconstruction method based on projection matrix
A non-cooperative target and projection matrix technology, applied in the field of 3D reconstruction, can solve the problems of inability to meet the real-time requirements of space operations and long calculation time, and achieve the effect of shortening the reconstruction time, reducing the amount of calculation, and meeting the requirements of real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
[0020] The idea of the present invention is: firstly extract the feature points from the images taken by the left and right cameras, and then match the corresponding feature points according to the principle of image matching; then obtain the rotation matrix R and the translation matrix T according to the principle of epipolar geometric constraints; 3D space point to the image plane projection matrix relationship, calculate the 3D space point coordinates.
[0021] The specific solution method is as follows:
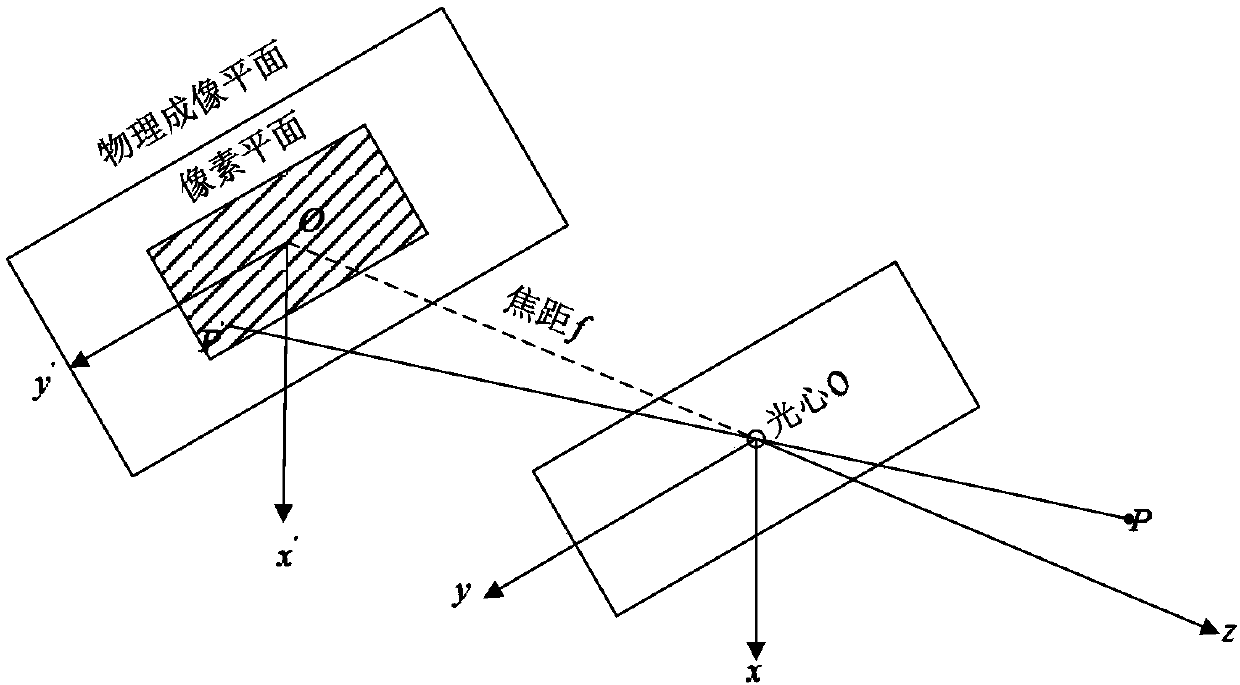
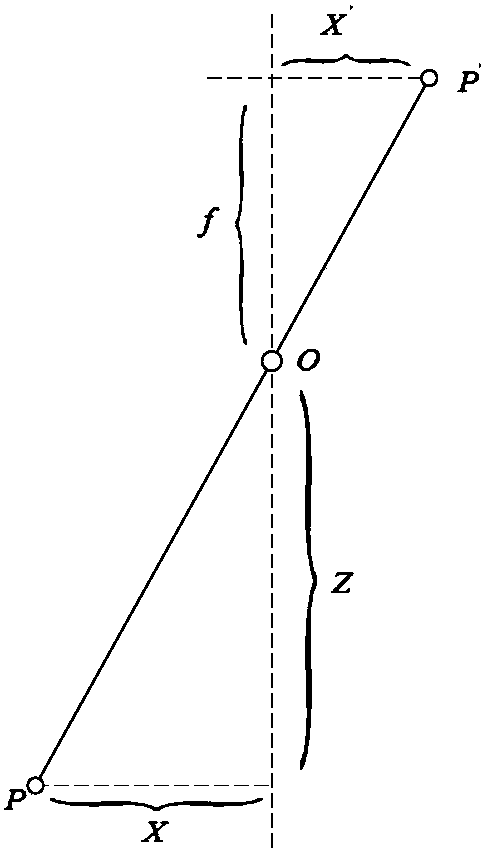
[0022] (1) First, the three-dimensional space point is projected onto the camera pixel plane. For this kind of projection relationship, we use the pinhole model to model this mapping relationship. Let O-x-y-z be the camera coordinate system, the z-axis points to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More