

Positioning device of oral implanting robot vision navigation system
A technology of robot vision and navigation system, which is applied in the field of positioning device of dental implant robot vision navigation system, can solve the problems of inability to directly locate the predetermined implant site, time-consuming and labor-intensive operation, complex structure, etc., to save manpower and operation space, save The effect of removing cumbersome steps and simplifying the operation steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention is further described below in conjunction with accompanying drawing.
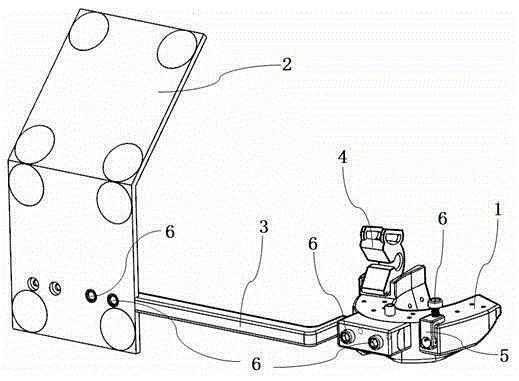
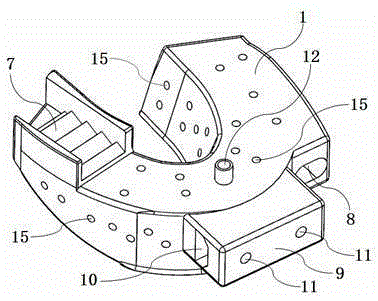
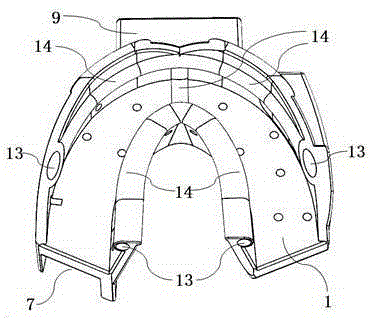
[0030] Such as figure 1 As shown, a positioning device for a visual navigation system of an oral implant robot includes a tray 1, a marking plate 2, a connecting rod 3, an opening retainer 4, an endoscope bracket 5, and a retaining screw 6. It is characterized in that the tray 1 and The marking plate 2 is connected through the connecting rod 3, wherein the tray handle 9 of the tray 1 is matched with the inserting tray part 20 of the connecting rod 2 through the connecting rod socket 10, and the retaining screw hole A11 of the tray handle 9 is inserted into the tray part 20. The retaining screw hole C22 provided on the top is fixed by the retaining screw 6, the retaining screw hole B17 of the marking plate 2 is coordinated with the retaining screw hole C22 of the connecting part A19 of the connecting rod 3 and fixed by the retaining screw 6, and the opening remains The holder 4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More