Deep-reinforcement-learning-based indoor robot scene active recognition method
An indoor robot and reinforcement learning technology, applied in the field of active recognition of indoor robot scenes, can solve the problems of large amount of image information, slow computing speed, expensive devices, etc., and achieve the effect of improving computing efficiency, ensuring accuracy, and reducing sensor requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] A method for active recognition of indoor robots based on deep reinforcement learning proposed by the present invention is described in detail in conjunction with the accompanying drawings as follows:
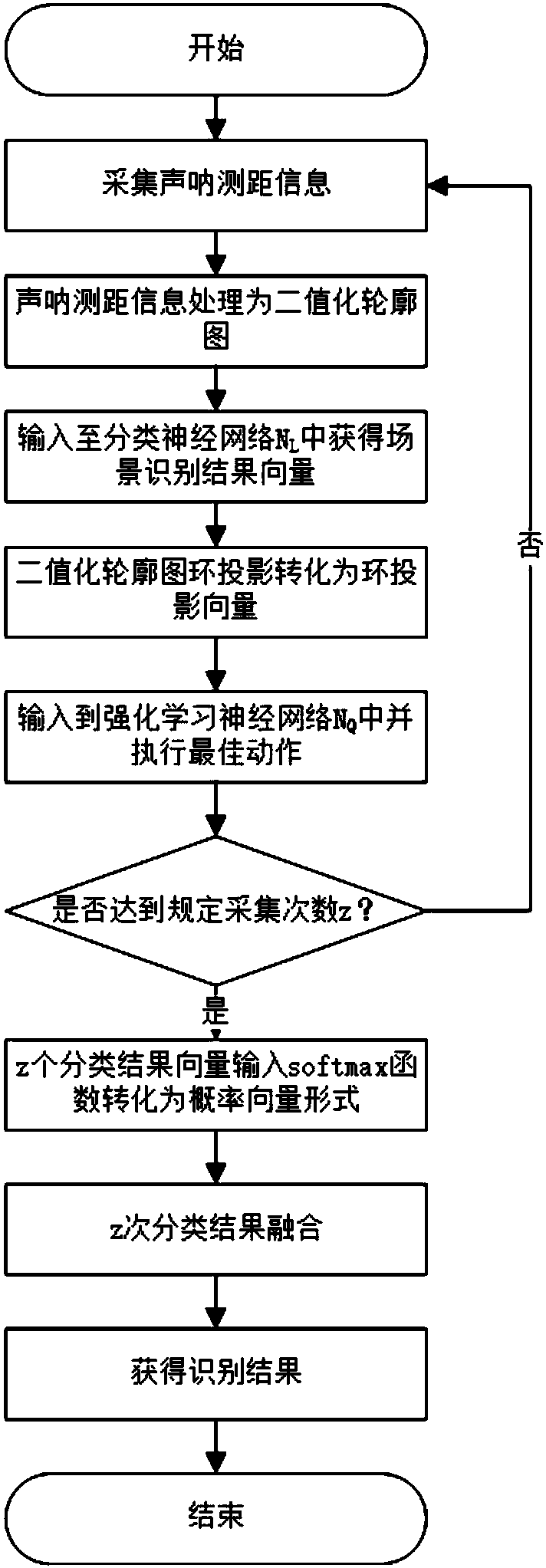
[0018] The present invention proposes a method and embodiment of active recognition of indoor mobile robots based on deep reinforcement learning. The robot used in the method is a mobile robot, which is suitable for indoor scene recognition. The method includes reinforcement learning neural network N Q Training stage and indoor scene active recognition execution stage;
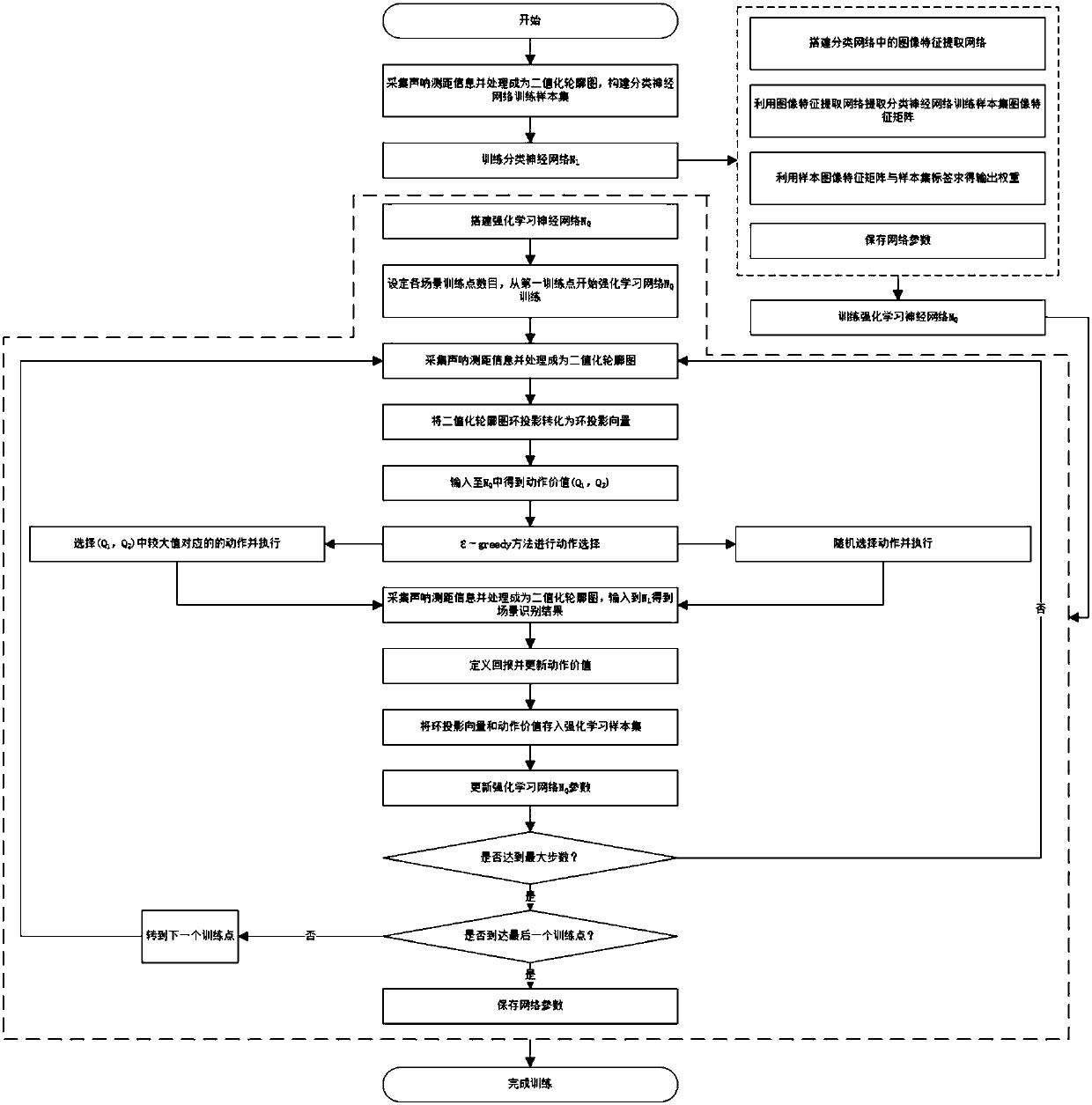
[0019] The reinforcement learning neural network N Q The training process is as follows figure 1 shown, including the following steps:
[0020] (1) Collect sonar ranging information and process it into a binary contour map to construct a classification neural network training sample set. The specific implementation steps are as follows:
[0021] (1-1) Constructing different types of indoor scenes. In ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More