

Four-degree-of-freedom inspection mechanical arm and control system and control method thereof
A technology for controlling systems and manipulators, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult disturbance control, achieve real-time response, wide application range, and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
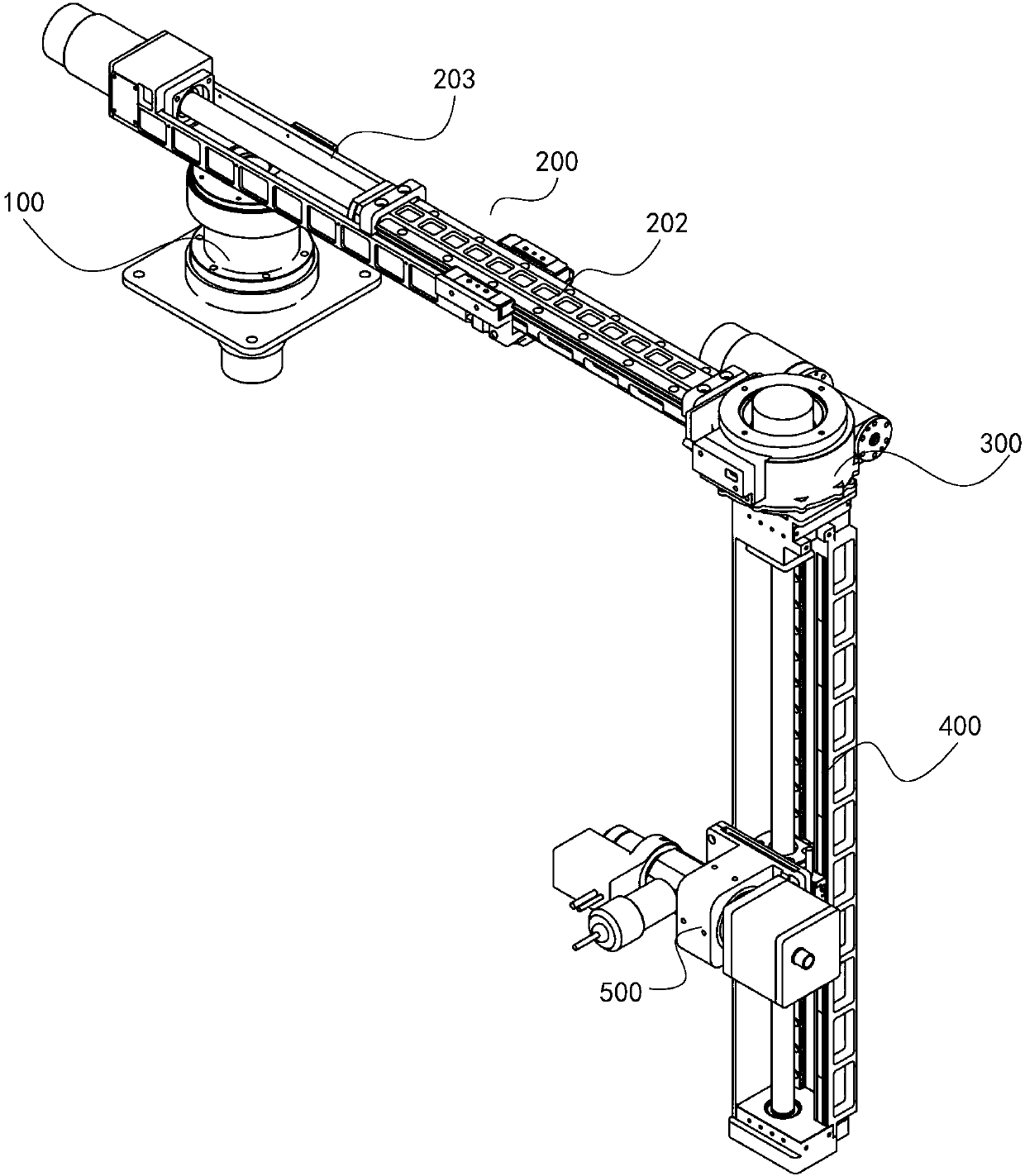
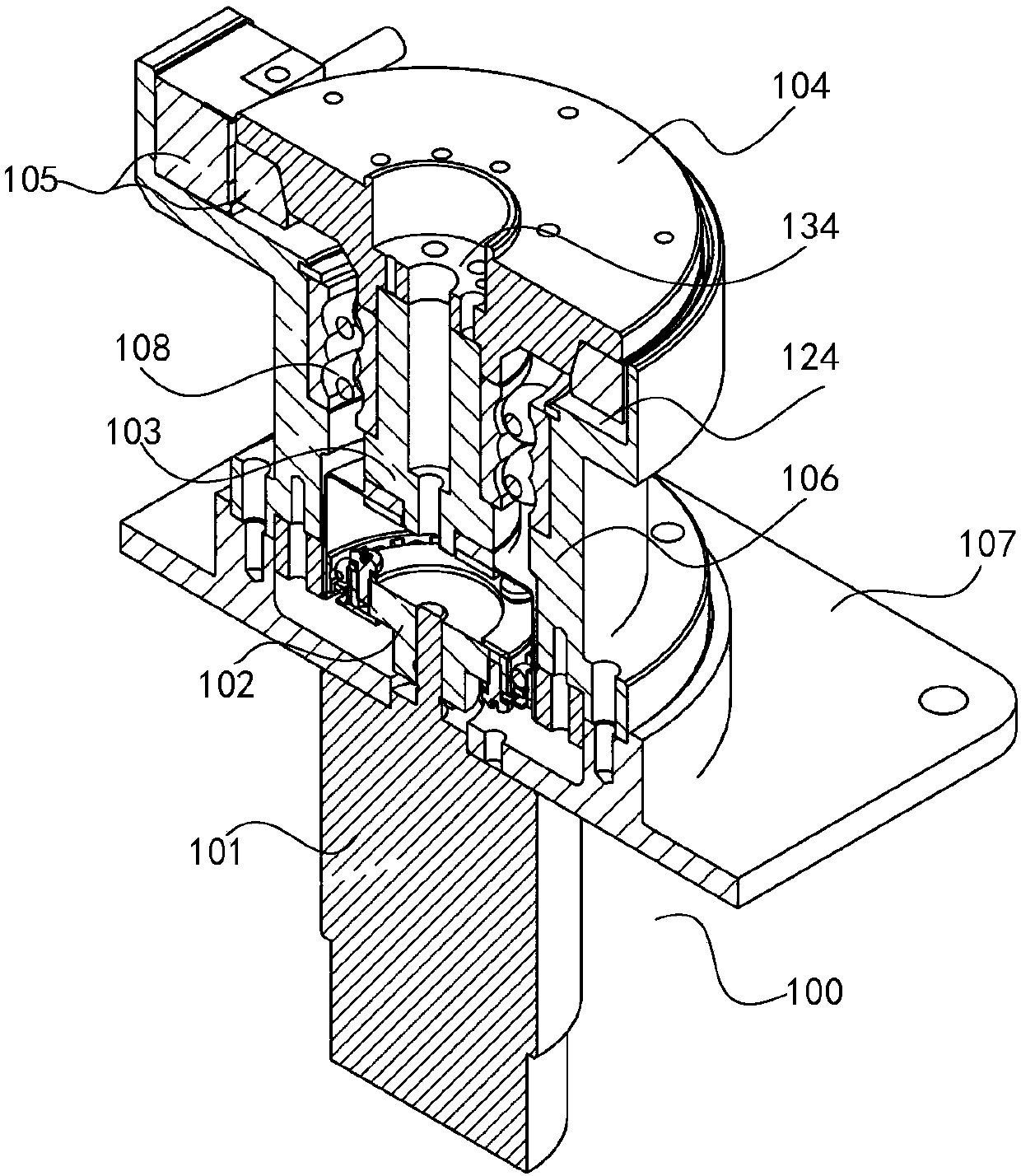
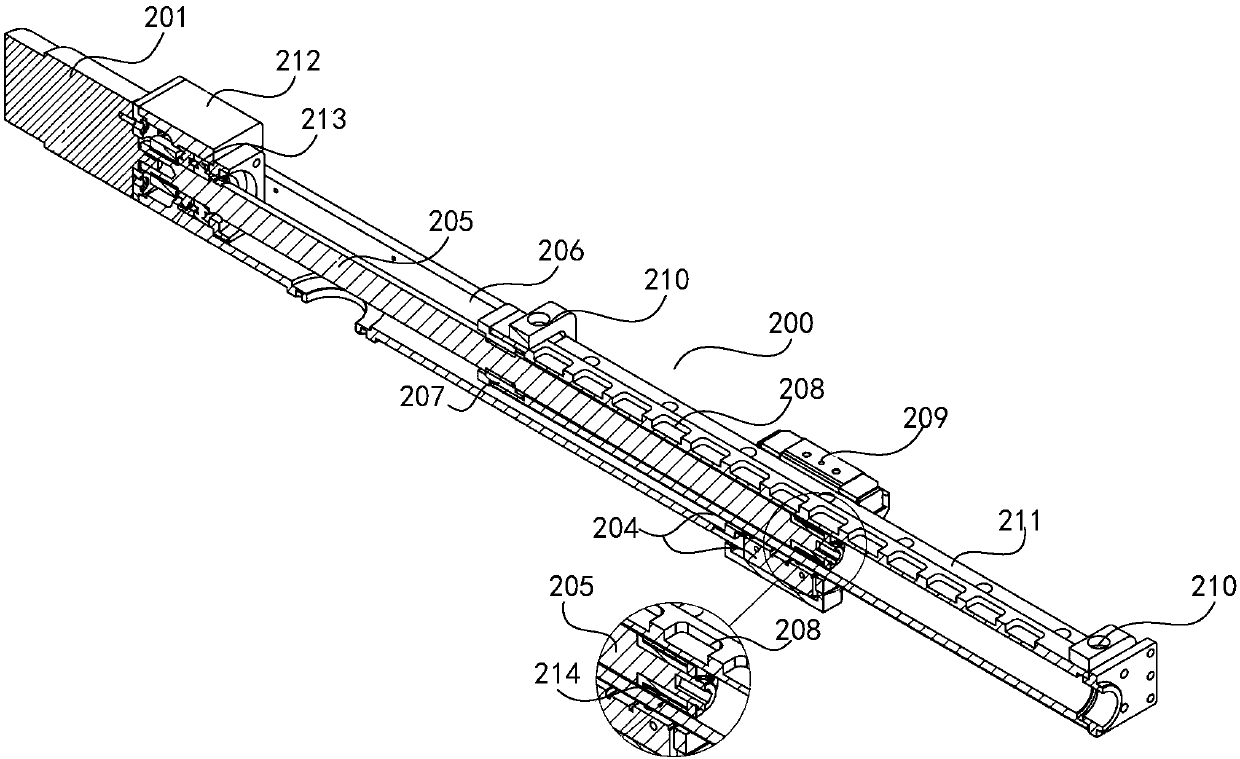
[0092] like Figure 1-Figure 5As shown, a four-degree-of-freedom inspection robot arm of this embodiment is installed on the top of the load center frame; it includes an image acquisition device 500, a telescopic arm 200, a first rotary joint 100, a second rotary joint 300 and a linear drive arm 400 , the telescopic arm 200 is arranged horizontally and one end thereof is rotatably connected to the top of the load center frame through the first rotary joint 100 , and the other end of the telescopic arm 200 is connected to the upper end of the linear drive arm 400 through the second rotary joint 300 Vertical rotation connection; the image acquisition device 500 is slidably connected to the linear driving arm 400 and m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More