

Automatic manual walking hydraulic electrical system of crawler excavator
An electrical system and technology for excavators, applied in the field of hydraulic and electrical systems for automatic and manual walking of crawler excavators, can solve the problems of excavator walking shaking, pilot pressure fluctuations, and easy driver fatigue, and achieve the effect of reducing labor intensity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
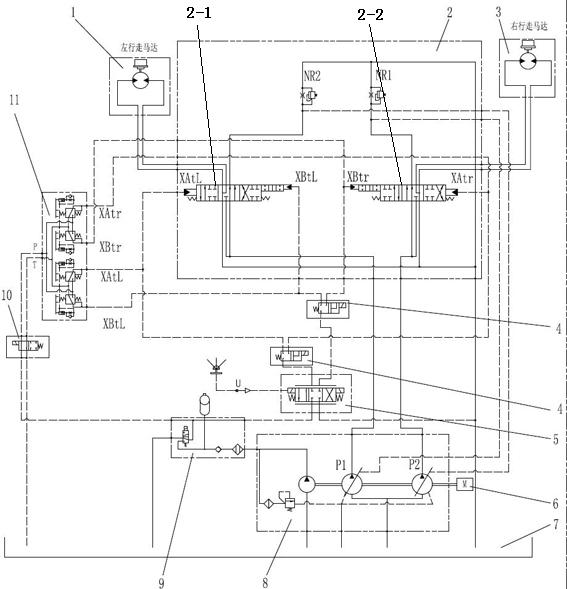
[0012] The present invention is provided with a three-position four-way proportional solenoid valve 5, the pressure oil port of the three-position four-way proportional solenoid valve 5 is connected to a two-position four-way solenoid valve 10, and the two-position four-way solenoid valve 10 is connected to the travel pilot when energized. The P port of the control valve 11 disconnects the oil circuit when the power is off; the two output ends of the three-position four-way proportional solenoid valve 5 are respectively connected to two two-position three-way solenoid valves 4, wherein: one two-position three-way solenoid valve The two outputs of the valve 4 are respectively connected to the XAtl of the left travel spool 2-1 and the XAtr of the right travel spool 2-2 of the travel hydraulic control valve 2, and the two outputs of the other two-position three-way solenoid valve 4 are respectively connected to To the XBtl of the left travel spool 2-1 of the travel hydraulic contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More