

Evaluation method and device of longitudinal control model of end-to-end automatic driving system
A longitudinal control and automatic driving technology, applied in the computer field, can solve the problems that limit the development of deep learning and cannot meet the evaluation requirements of the longitudinal control model of the automatic driving system, and achieve the effect of improving learning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
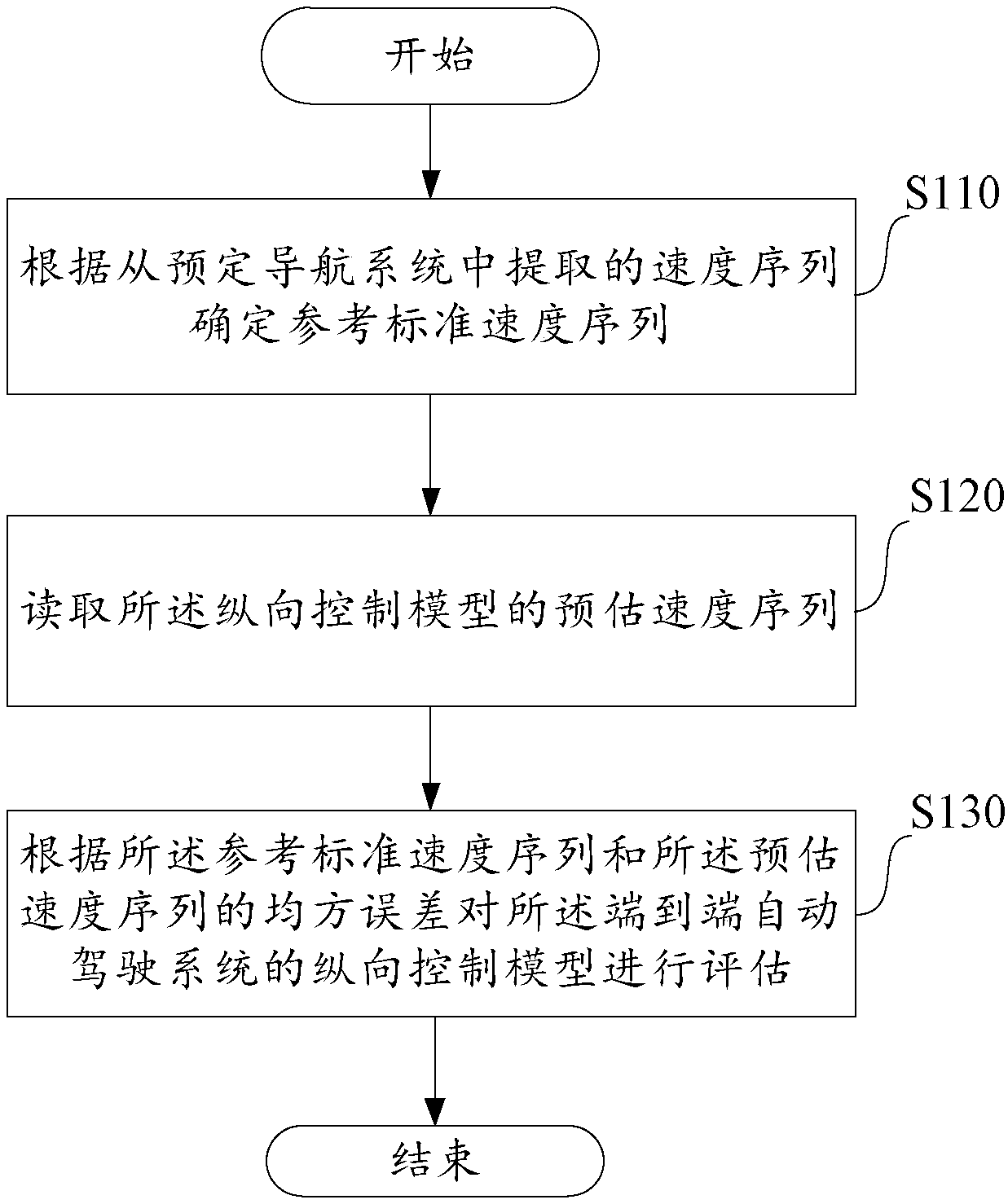
[0050] In the prior art in this field, the longitudinal control of the automobile mainly refers to the speed control. However, the traditional evaluation method can only evaluate the self-learning driving system by simulating the driver's intervention and calculating the time proportion of the autonomous vehicle. In fact, the longitudinal control model of the automatic driving system is much more complicated, so the traditional methods cannot meet the requirements of evaluating the longitudinal control model of the automatic driving system.
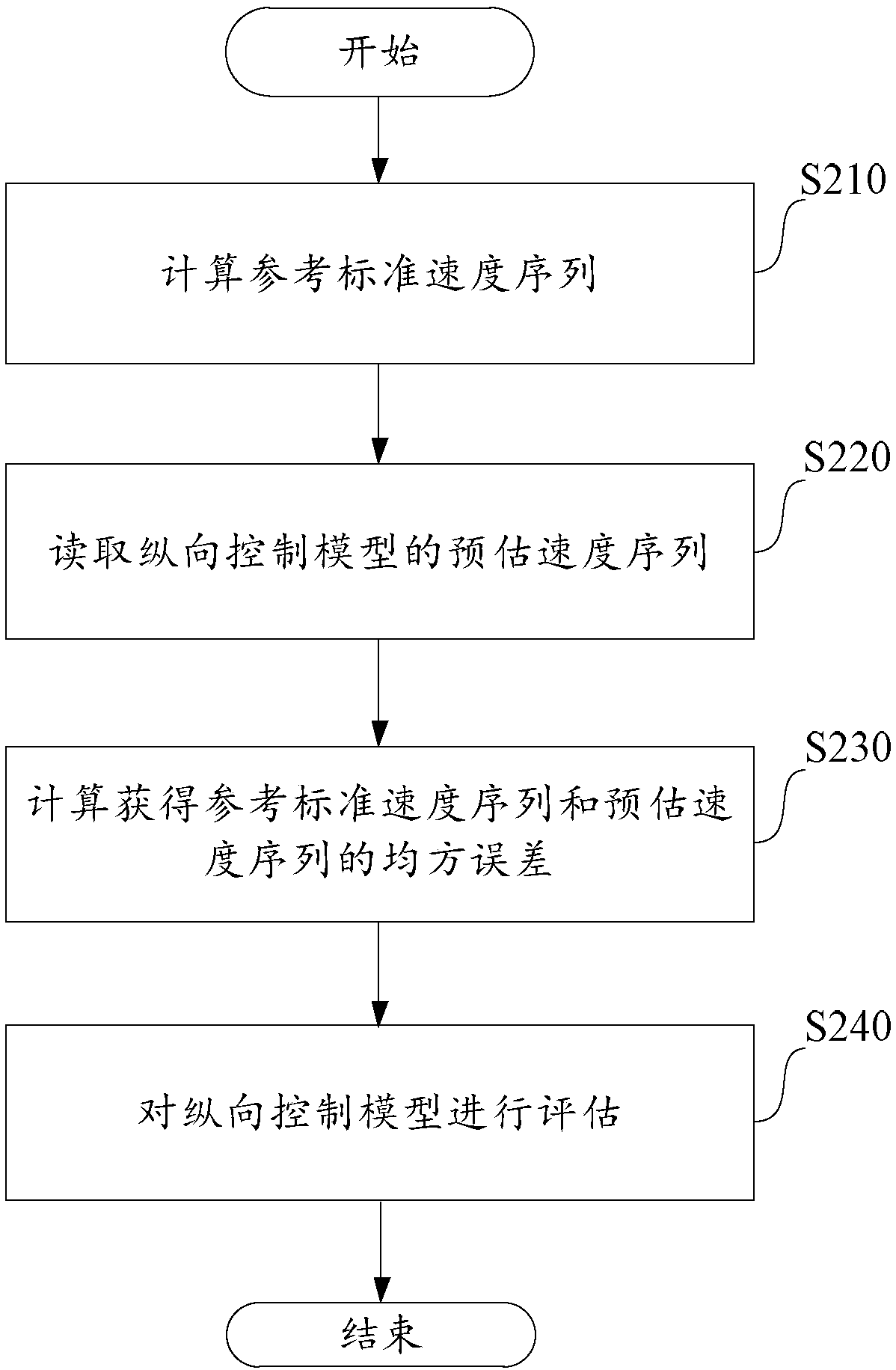
[0051] Therefore, this embodiment proposes yet another evaluation method for a longitudinal control model of an end-to-end automatic driving system, combining figure 2 , including the following steps:
[0052] S210. Calculate a reference standard speed sequence.
[0053] Based on the UTC, read the due east velocity component v at the current moment east and the velocity component v in the north direction north , and by computing the ...
Embodiment 2
[0065] In the existing technology in this field, since traditional evaluation methods can only evaluate some single parameters, for example, by calculating the number of simulated human interventions initiated when the simulated vehicle deviates from the center line by more than one meter, that is, the time of the automatic driving system ratio to evaluate the steering angle. Since the longitudinal control of the car mainly refers to the speed control, these methods cannot evaluate the longitudinal control model of the autonomous driving system.
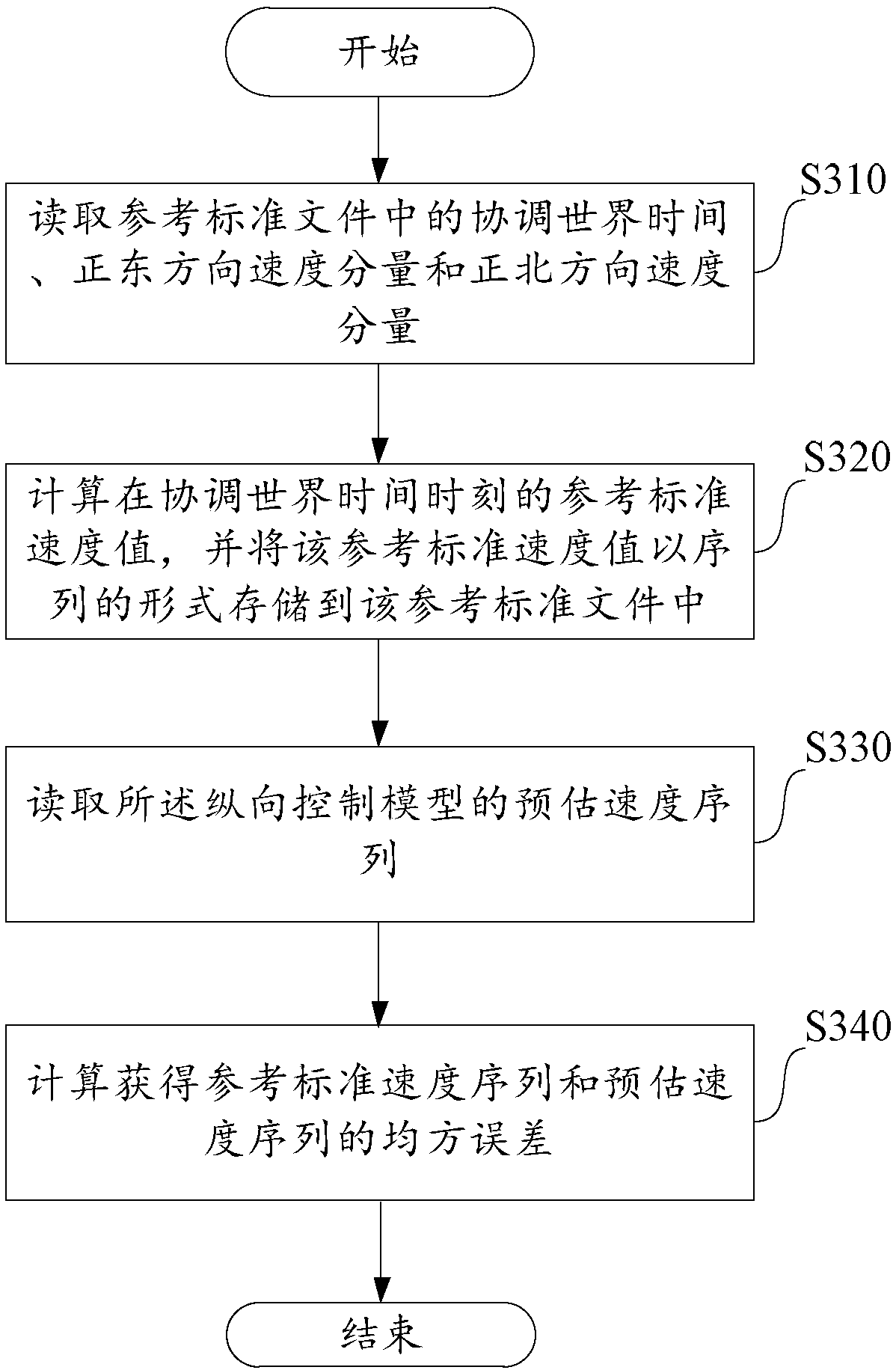
[0066] Therefore, this embodiment proposes an evaluation method for a longitudinal control model of an end-to-end autonomous driving system, combining image 3 , including the following steps:
[0067] S310. Read the UTC, the due east velocity component, and the due north velocity component in the reference standard file.
[0068] The time in the predetermined navigation system is usually a GPS week. For the convenience of calculat...
Embodiment 3
[0097]In the prior art in this field, the longitudinal control of the automobile mainly refers to the speed control. However, the traditional evaluation method can only evaluate the self-learning driving system by simulating the driver's intervention and calculating the time proportion of the autonomous vehicle. In fact, the longitudinal control model of the automatic driving system is much more complicated, so the traditional methods cannot meet the requirements of evaluating the longitudinal control model of the automatic driving system.
[0098] Therefore, this embodiment proposes another evaluation device for a longitudinal control model of an end-to-end automatic driving system, combining Figure 5 As shown in , including the following devices:
[0099] A device for calculating a reference standard speed sequence (hereinafter referred to as "the first calculation device") 510;
[0100] A device for reading the estimated velocity sequence of the longitudinal control mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More