Logistics robot, method and controller used for logistics robot, and computer readable medium
A logistics robot and main controller technology, applied in two-dimensional position/channel control, non-electric variable control, control/adjustment system, etc., can solve the problems of large manpower consumption, a large number of manual interventions, and low handling efficiency, and achieve The effect of improving work efficiency and saving labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0134] Scheme 1. A logistics robot, comprising:
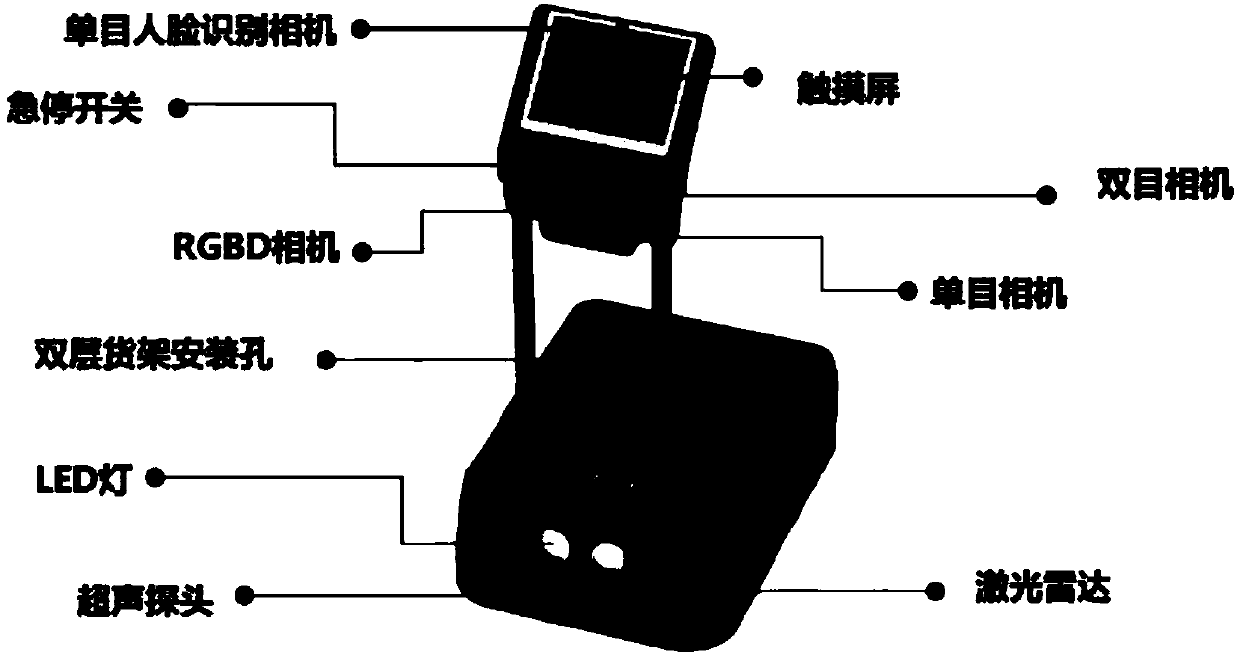
[0135] removable base;
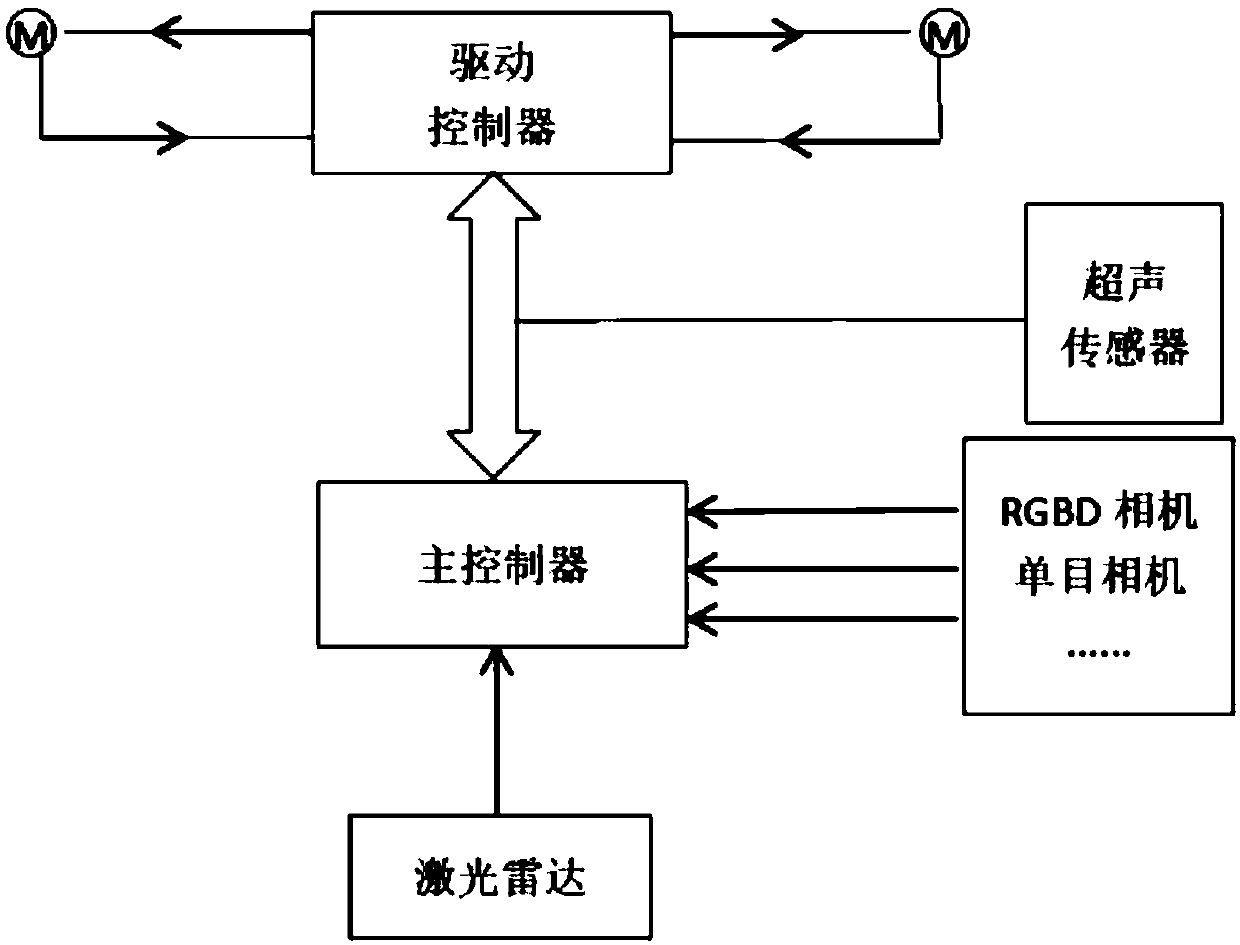
[0136] an information collection device, suitable for collecting image information and depth information of objects existing within its coverage;
[0137] a main controller, coupled to the information collection device, and configured to:
[0138] Acquiring identity information of a following target to be followed by the logistics robot, wherein the following target has an associated identification feature;
[0139] receiving the image information and depth information from the information collection device;
[0140] The image features corresponding to the identification features are extracted from the image information, the image features are matched with the identification features to identify the following target, and based on the following targets captured by the information acquisition device The position in the image determines the direction of the following target relative to the logistics rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



