

Single-camera hand-eye calibration method of manipulator end
A hand-eye calibration and robotic arm technology, applied in image data processing, instruments, calculations, etc., can solve problems such as complex calibration process, low calibration efficiency, and impact on calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
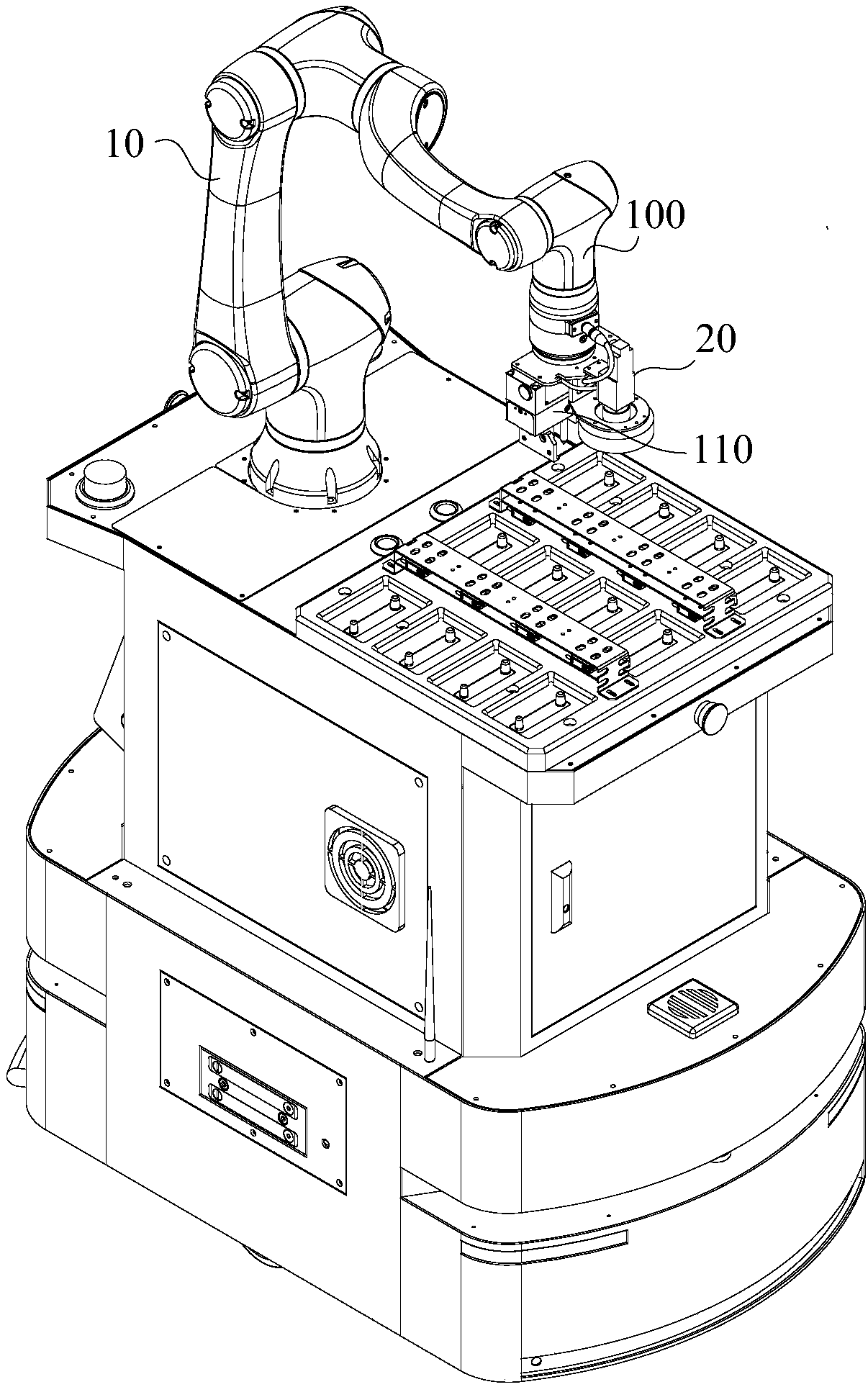
[0034] In order to facilitate the understanding of the present invention, the hand-eye calibration method of the single camera at the end of the mechanical arm will be described more fully below with reference to the relevant drawings. The preferred embodiment of the hand-eye calibration method for a single camera at the end of the manipulator is given in the accompanying drawings. However, the hand-eye calibration method of a single camera at the end of the robotic arm can be implemented in many different forms, and is not limited to the embodiments described herein. On the contrary, the purpose of providing these embodiments is to make the disclosure of the hand-eye calibration method for the single camera at the end of the mechanical arm more thorough and comprehensive.
[0035] It should be noted that when an element is referred to as being "fixed" to another element, it can be directly on the other element or there may be an intervening element. When an element is said t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More