

Multiple-gesture robot control method based on binocular vision
A binocular vision and control method technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems that the recognition is greatly affected by light and background color, the off-line teaching method has a large amount of calculation, and the operation is inconvenient.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
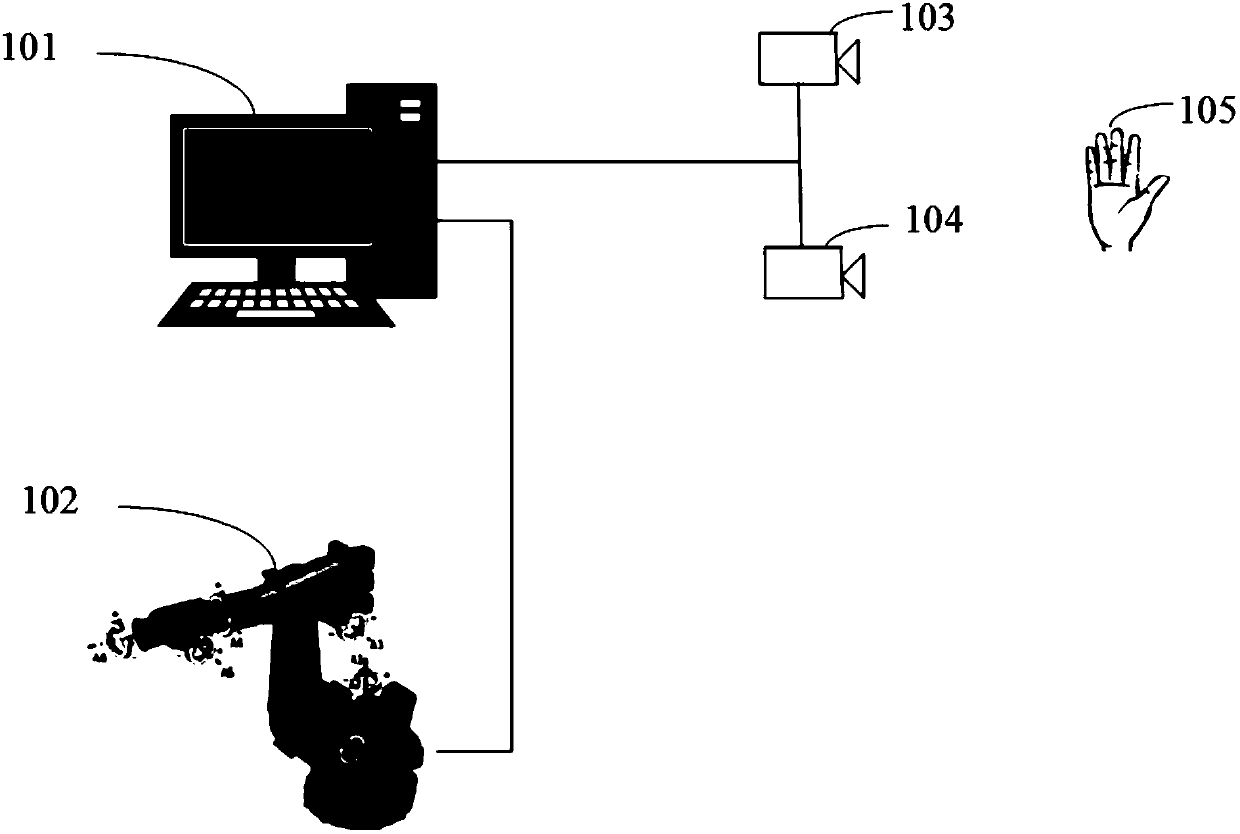
[0077] The multi-gesture robot control method based on binocular vision of the present invention is based on such as figure 1 The device shown is realized, wherein 101 is a host computer, which includes a processor for computing and controlling the robot; 102 is a painting robot; 103 is the left camera of a binocular camera, which can also be called a left camera, and 104 is a binocular Camera Camera right camera, also called right camera. 105 is the operator's hand. A group of binocular cameras are placed in parallel as the gesture detection part, and the control signals are obtained through computer processing and sent to the robot. The operator only needs to keep the hand in the field of view of both cameras.
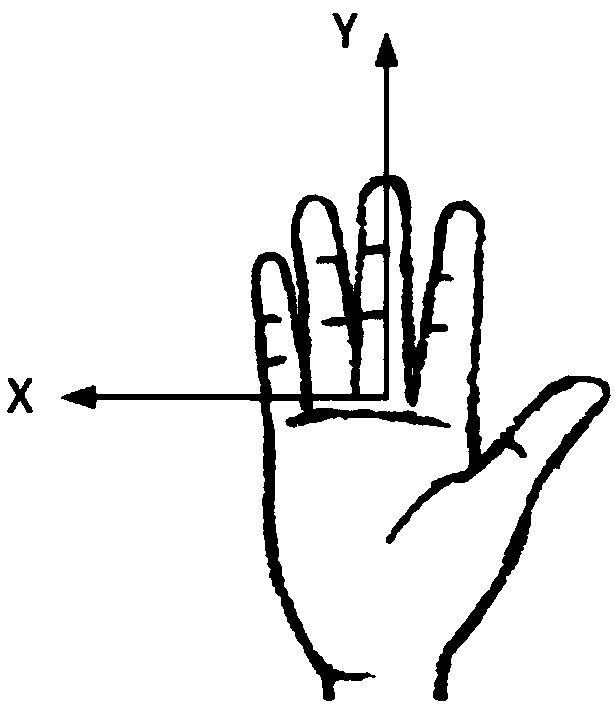
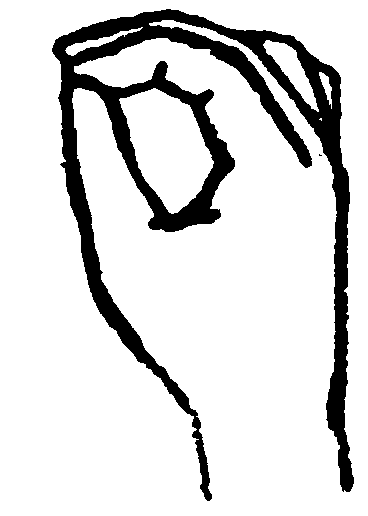
[0078] In order to prevent the coupling of position control and attitude control, two gestures can be recorded and learned in advance, one is position control and the other is attitude control. The present invention defines gesture control when the palm is open, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More