

Part identification and positioning method based on mixed model
A hybrid model and part technology, applied in image data processing, instruments, calculations, etc., can solve the problems of discrete translation and rotation accuracy, geometric deformation of parts and template images, and low recognition and positioning accuracy of template matching algorithms, and achieve robustness. High and robust effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to further illustrate the features of the present invention, please refer to the following detailed description and accompanying drawings of the present invention. The accompanying drawings are for reference and description only, and are not intended to limit the protection scope of the present invention.
[0046] Such as figure 1 As shown, this embodiment discloses a hybrid model-based part identification and positioning method, including the following steps S1-S5:
[0047] S1. Collect the part image, and use the template matching algorithm to identify the parts in the part image, and obtain the corresponding pose of each part;
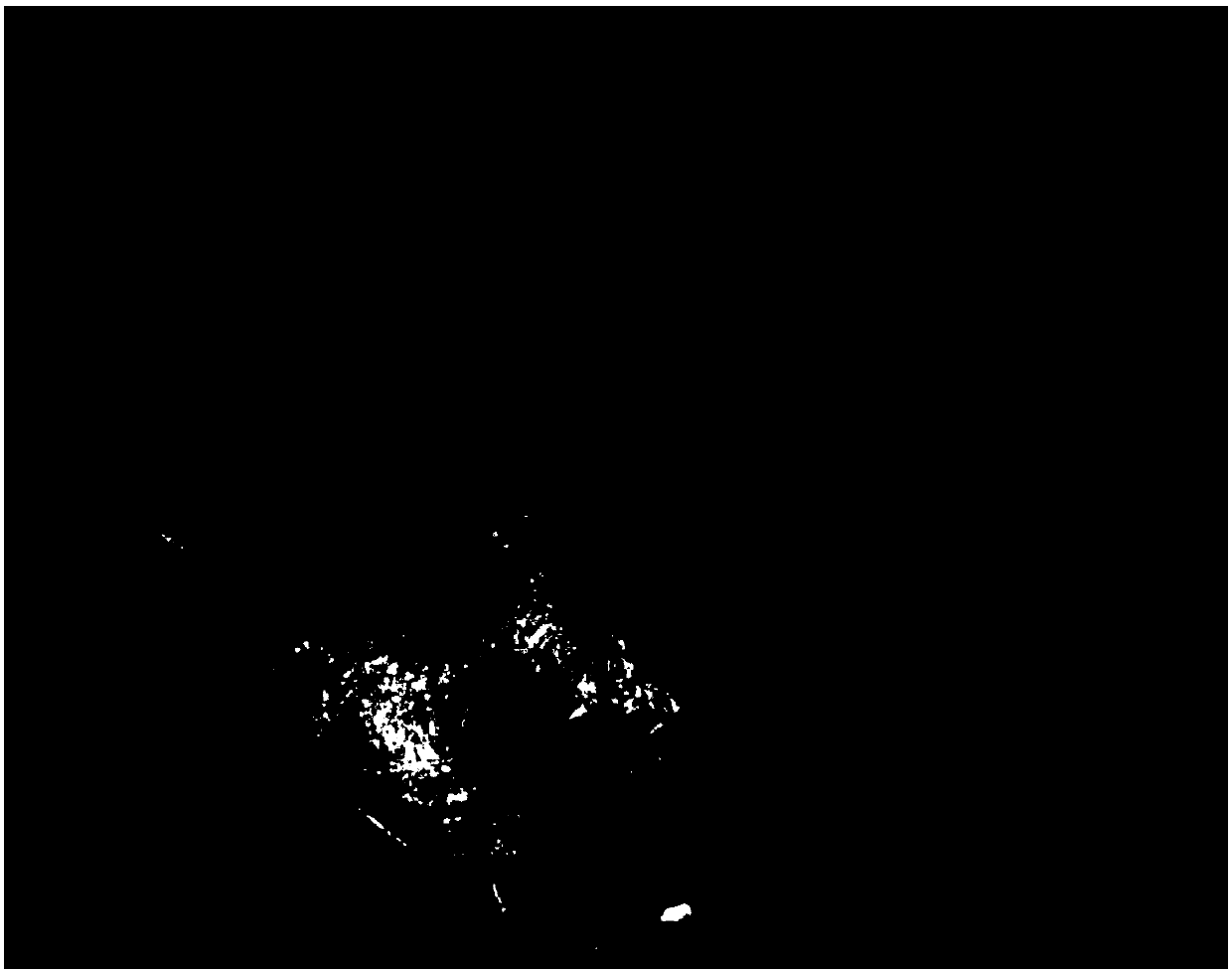
[0048] It should be noted that, in this embodiment, the model MV120SC produced by Vision Vision Company is used to collect images with an industrial camera with an imaging resolution of 1280 pixels × 960 pixels and a focal length of 8 mm. The collected images are as follows: figure 2 shown. Then create template image like image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More