

Speed trajectory planning anti-swing method of double-pendulum bridge crane
A bridge crane and trajectory planning technology, applied in the direction of load hanging components, transportation and packaging, etc., can solve the problems of difficult measurement of angular velocity information, increase the difficulty and cost of crane design, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
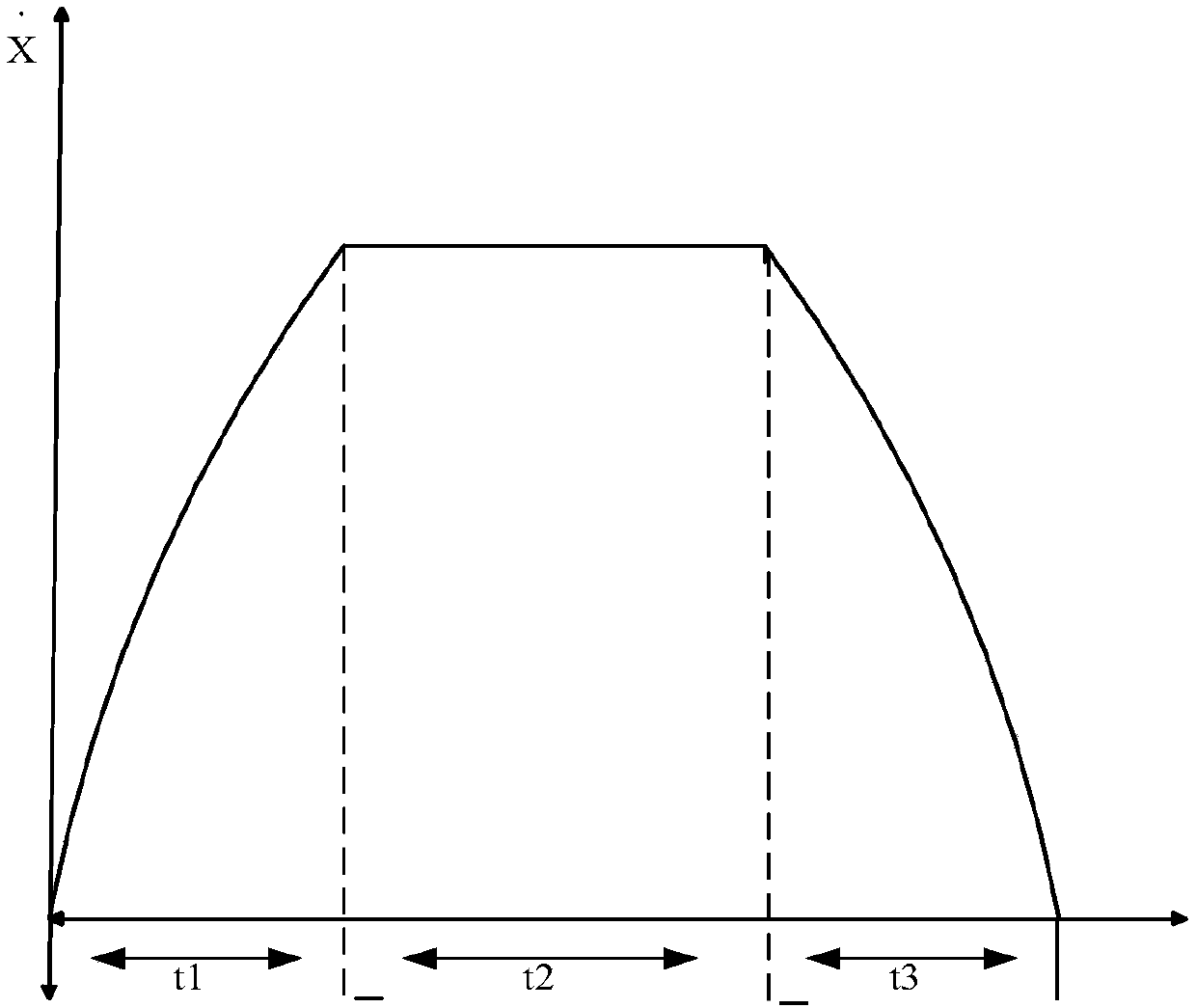
[0024] The present invention provides an anti-swing control method aimed at speed trajectory planning of a double pendulum bridge crane. The control method of the present invention combines the established linearized model of the double pendulum crane with the set speed trajectory planning equation, and utilizes boundary conditions, Solve the time optimal acceleration and deceleration time parameters. Then, the trolley is controlled by the controller to track the speed trajectory, so as to achieve the anti-swing function of the double pendulum bridge crane under the condition of no sensor feedback.
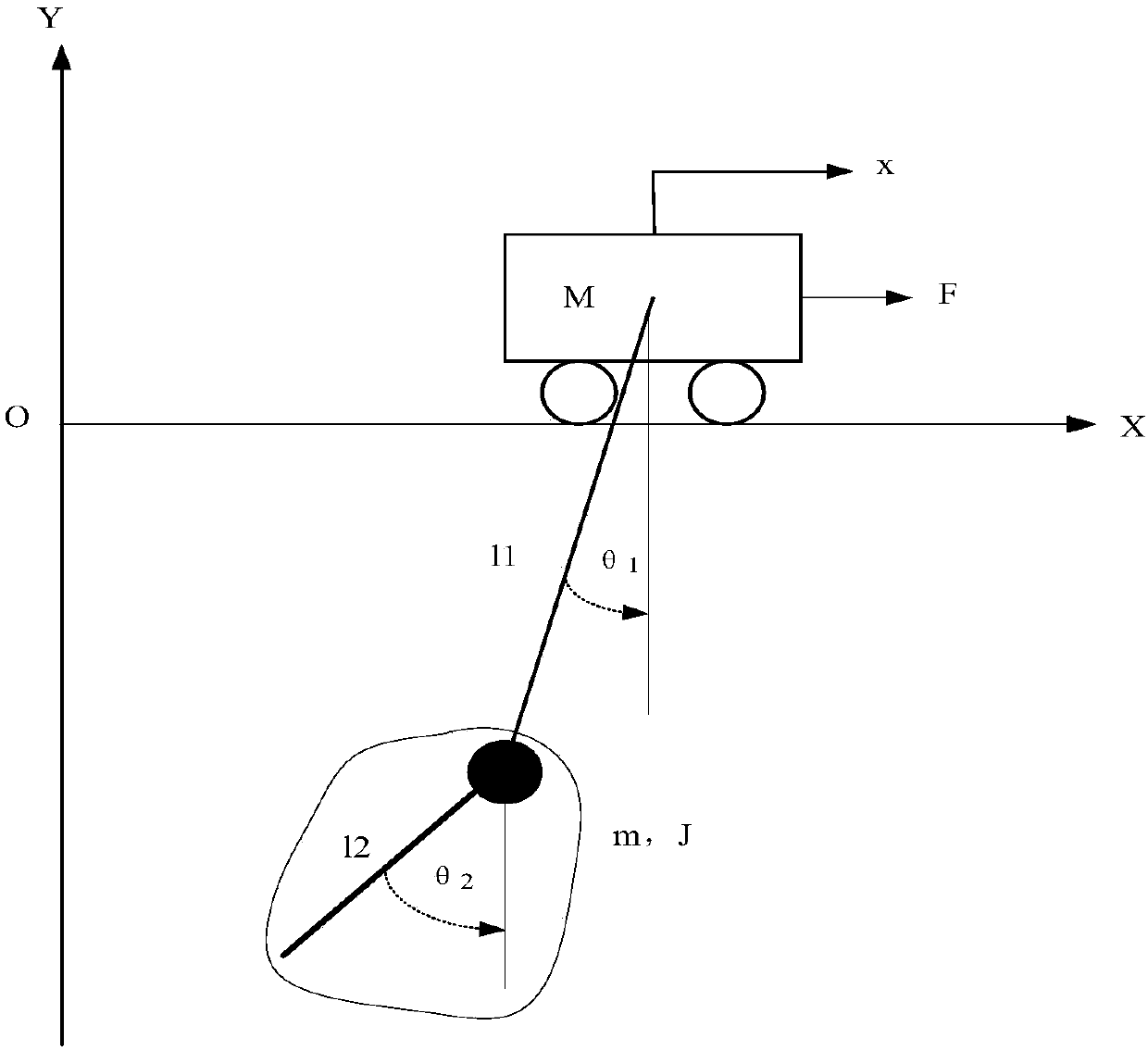
[0025] in such as figure 1 In the distributed mass two-dimensional bridge type double pendulum crane model shown, M represents the mass of the trolley, and the hook and the distributed mass load are regarded as a whole, represented by m, l 1 and l 2 Respectively represent the length of the suspension rope and the distance between the end of the suspension rope and the center of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More