Python-based offline programming simulation system for desktop robots
An off-line programming and simulation system technology, which is applied in the field of desktop robot off-line programming and simulation systems, can solve problems such as poor robot compatibility, weak human-computer interaction, and no mention of trajectory optimization, so as to improve processing efficiency and shorten the research and development cycle. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
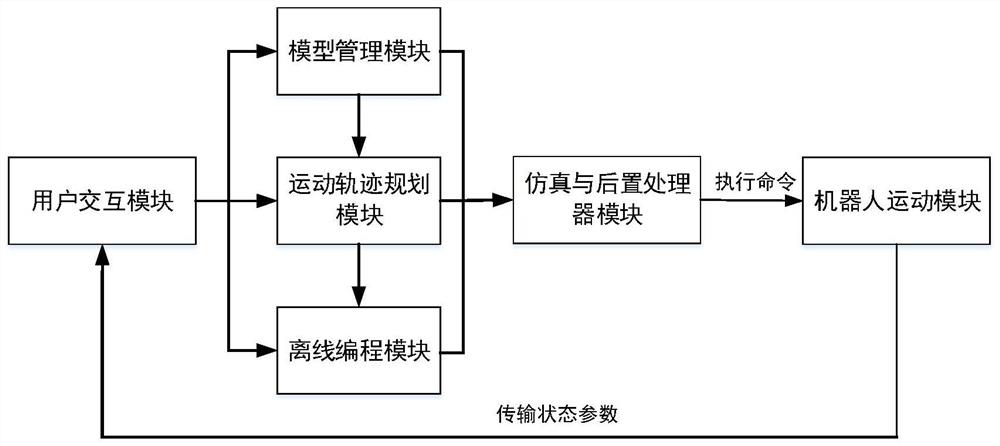
[0066] combine figure 1 , figure 2 , image 3 and Figure 4 , the specific implementation of the patent of the present invention is as follows:
[0067] The offline programming simulation system for desktop robots based on Python, according to the diversity of control commands of various desktop robots, and relying on the strong compatibility of Python language, a set of implementation system for offline programming of desktop robots is designed; the online simulation of desktop robots is expanded With the function of offline programming; the PC software is installed on the user's Windows computer, the desktop robot is connected to the PC through a USB cable, and the robot joint sensor is connected to the robot controller through a serial port; taking the control of Dobot-Magician as an example, the described method is based on Python's desktop robot offline programming system, including:
[0068] 1) The user interaction module is mainly used for human-computer interactio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More