

Unmanned vehicle route tracking control method based on skid turn and slippage coupling estimation
An unmanned vehicle and control method technology, which is applied in the field of unmanned vehicle path tracking control based on slip-slip coupling estimation, can solve the problems of unrealizable, unable to calculate the slip-slip amount, tracking and other problems from time to time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] A kind of unmanned vehicle path tracking control method based on slip-slip coupling estimation of the present invention will be further described below in conjunction with accompanying drawings and specific embodiments:
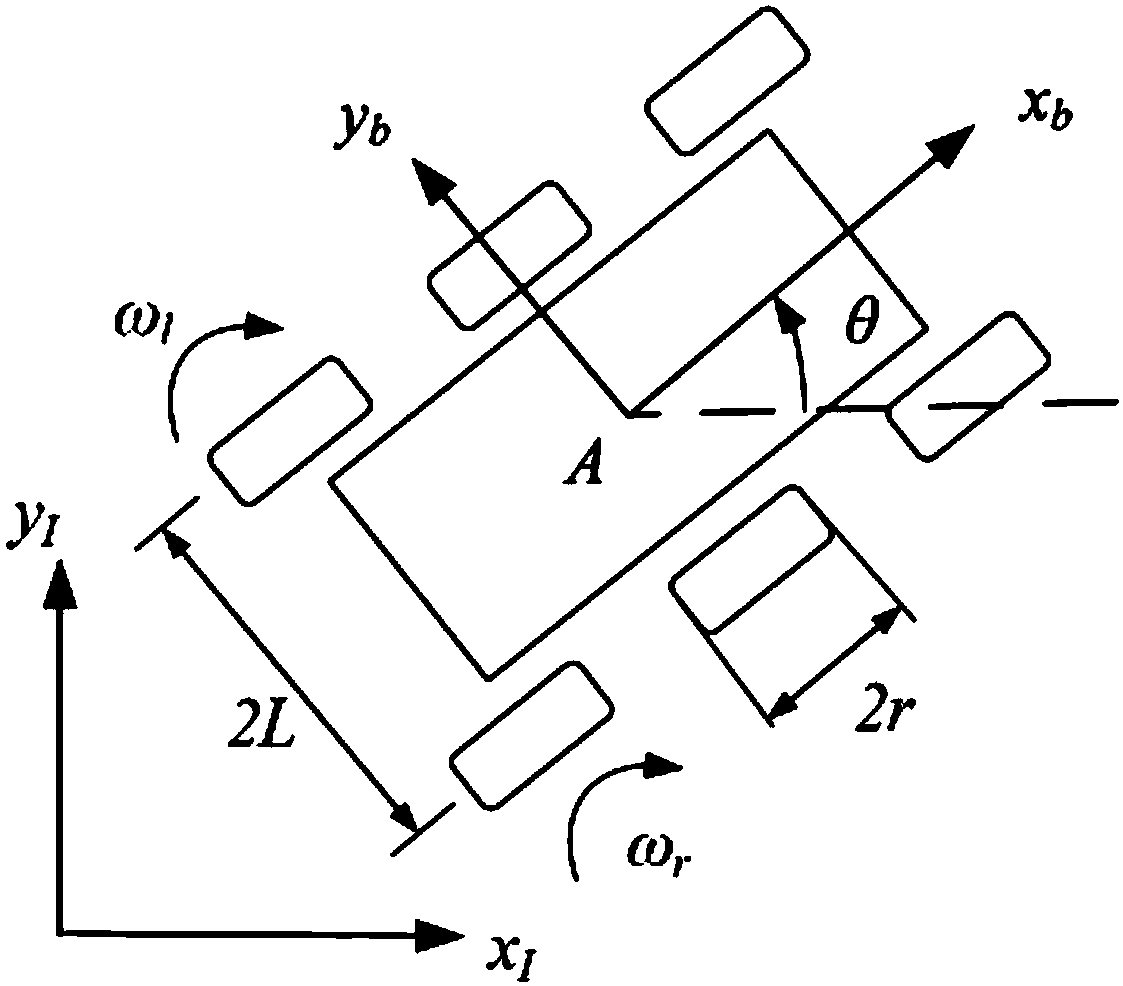
[0061] The unmanned vehicle involved in the present invention is an unmanned vehicle with independent full drive, no active steering freedom of the wheels, and the unmanned vehicle with the same wheel speed on the same side of the vehicle body. This unmanned vehicle includes a GPS-INS combined positioning system, The encoder used to collect wheel speed data and the vehicle controller to send the drive motor speed to the vehicle controller.
[0062] Such as figure 1 , figure 2 , image 3 with Figure 4 Shown, the present invention is a kind of unmanned vehicle path tracking control method based on skid-slip coupling estimation, and this method comprises the following steps:
[0063] Step 1: Receive the expected trajectory and the expected trajector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More