

Upper limb rehabilitation training robot based on electrical nerve stimulation and using method thereof
A rehabilitation training and robotic technology, applied in the fields of electrotherapy, artificial respiration, passive exercise equipment, etc., can solve the problems of in-depth research on the neurological rehabilitation law of unfavorable hemiplegic patients, unattractive and unfavorable treatment plan determination and improvement, etc. Maximum recovery and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the examples, but it should not be understood that the scope of the subject of the present invention is limited to the following examples. Without departing from the above-mentioned technical ideas of the present invention, various replacements and changes made according to common technical knowledge and conventional means in this field shall be included in the protection scope of the present invention.
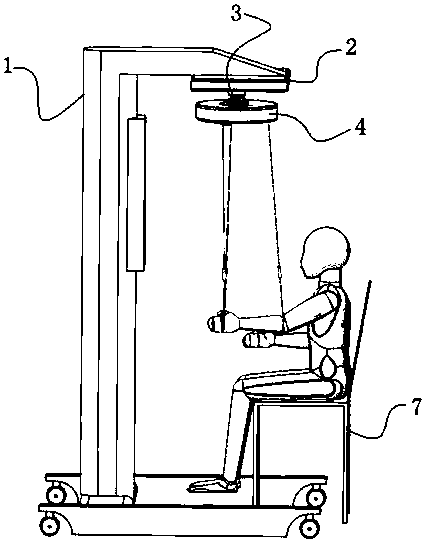
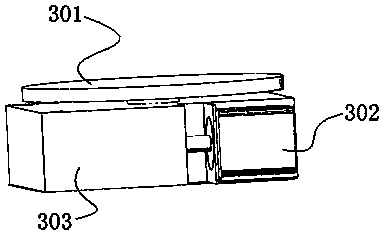
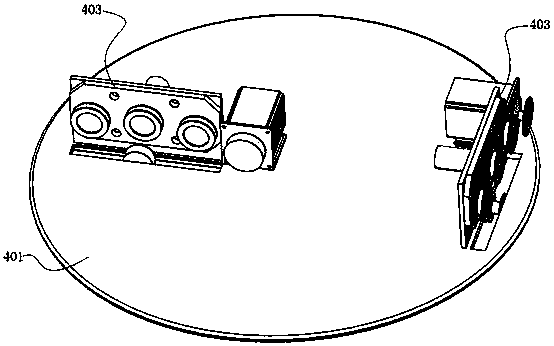
[0042] An upper limb rehabilitation training robot for electrical nerve stimulation, characterized in that it includes a support frame 1, a two-degree-of-freedom sliding table guide rail 2, a rotating device 3, a suspension device 4, a wrist protector 5, an elbow protector 6, a seat 7 and electrical stimulation equipment.
[0043]The two-degree-of-freedom sliding table guide rail 2, the rotating device 3 and the suspension device 4 are installed in series, and the two-degree-of-freedom sliding ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More