Three degree-of-freedom bionic-eye neck mechanism with gravity torque being eliminated
A technology that eliminates gravity and degrees of freedom. It is applied in the field of bionic robots. It can solve problems such as affecting the efficiency of motor drive, increasing load, and complex structure, so as to achieve the effect of increasing work reliability, increasing drive efficiency, and simple overall structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below with reference to the accompanying drawings and examples.
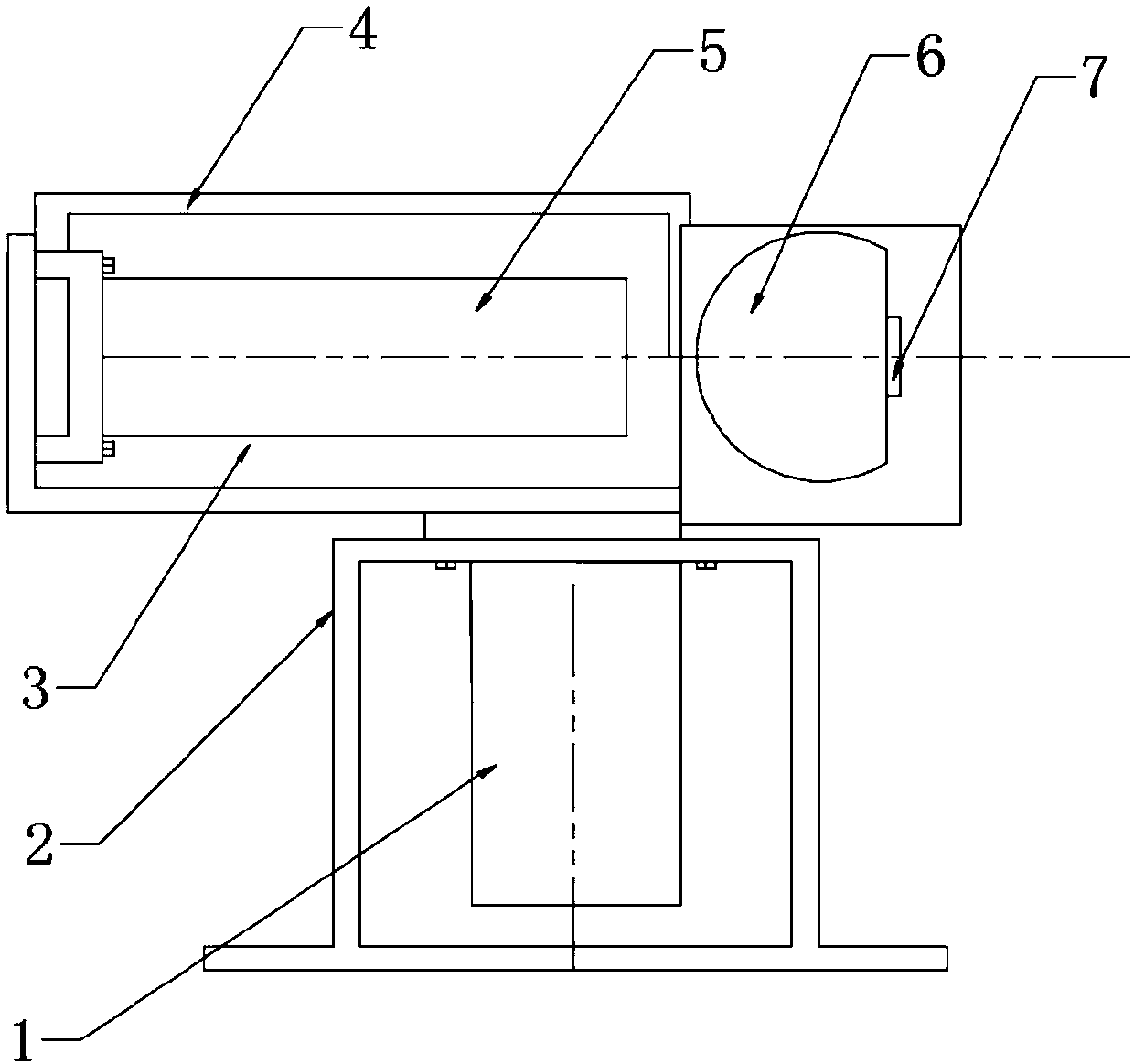
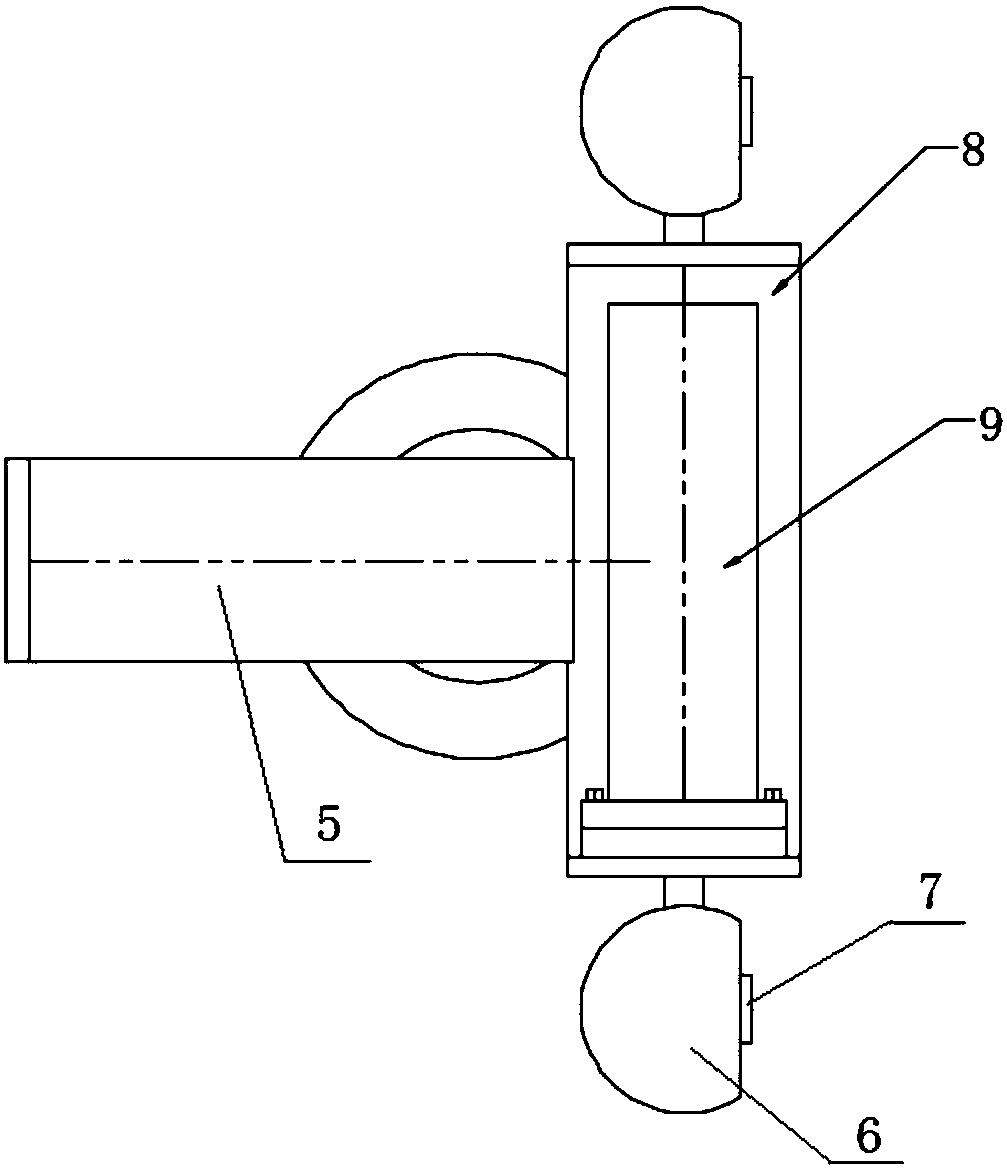
[0017] See attached figure 1 , 2 , a three-degree-of-freedom bionic eye-neck mechanism that eliminates gravity torque, including: a first motor 1 for realizing the action of turning the head (rotation of the head around the neck); left and right swing) action of the second motor 5 and the third motor 9 for realizing the action of nodding;
[0018] The central axes of the output shafts of the first motor 1, the second motor 5, and the third motor 9 are perpendicular to each other in space, and are used to realize the three degrees of freedom of the neck mechanism;
[0019] The first motor 1 is fixedly installed on the first frame 2, and the output shaft of the first motor 1 is connected with the second frame 3, then under the drive of the first motor 1, the second frame 3 is driven and linked with it The components rotate around the axis of the output sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com