

Real-time three-dimensional gesture estimation method based on single RGB frame
A real-time three-dimensional, gesture technology, applied in the field of gesture estimation, which can solve the problems of rapid movement, self-occlusion, or the influence of occlusion from other objects during operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
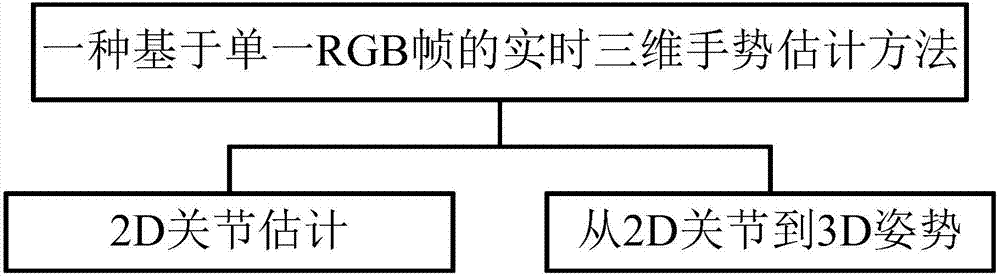
[0034] figure 1 It is a system frame diagram of a real-time three-dimensional gesture estimation method based on a single RGB frame of the present invention. It mainly includes 2D joint estimation and from 2D joint to 3D pose.
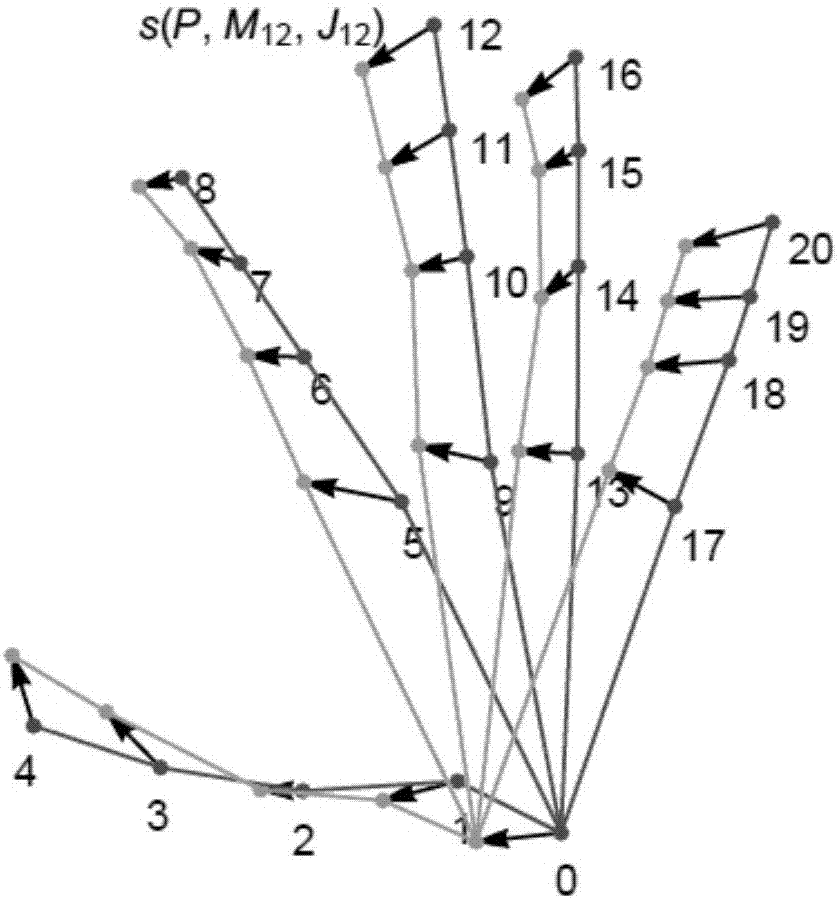
[0035] 2D joint estimation, cropping the image according to the detected bounding box, feeding it to a 2D keypoint detector; since the keypoint detector is only trained on the left hand, the right hand is handled by mirroring the image along the Y axis; the output of the detector is 21 heat maps, corresponding to estimates for 20 hand keypoints (four for each finger) and one wrist point.
[0036] From 2D joints to 3D poses including hand models, single camera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More