

Control method for sweeping robot
A technology of a sweeping robot and a control method, which is applied to manual sweeping machinery, carpet cleaning, floor cleaning, etc., can solve the problems of low practicability, unreasonable allocation of resources, inconvenient life of users, etc., and achieves reasonable utilization, strong practicability, The effect of reducing the burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
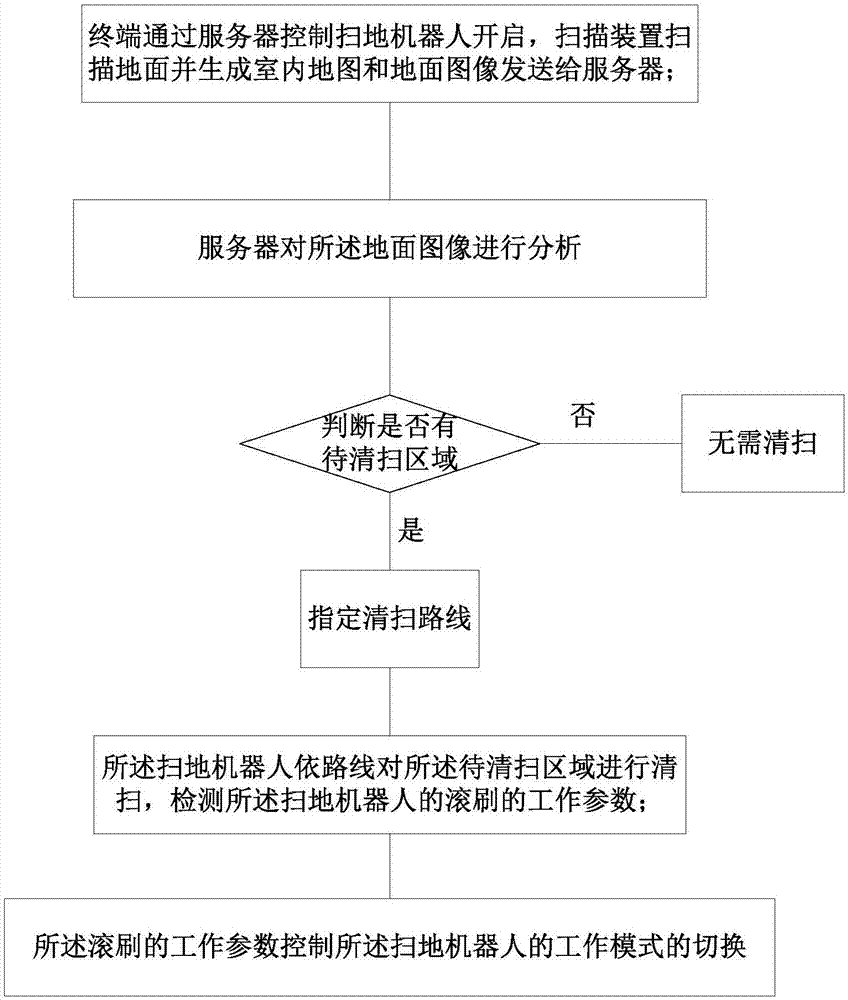
[0024] refer to figure 1 As shown, a control method of a sweeping robot of the present invention is characterized in that: comprising the following steps:
[0025] Step 1: The terminal controls the sweeping robot to turn on through the server, the scanning device scans the ground and generates indoor maps and ground images and sends them to the server;
[0026] Specifically, the scanning device includes a camera, a laser generator, a CMOS image sensor, a photoelectric encoder, and an infrared sensor. The camera captures images of the ground, and uploads the captured images and the generated indoor map to the server. It can be understood that the foregoing ground images may be multiple, including the entire ground area.
[0027] Step 2: The server analyzes the ground image, judges the area to be cleaned on the ground in the room, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More