

Collision detection method for sensor-less type cooperative robot
A collision detection and robot technology, applied in instruments, manipulators, program-controlled manipulators, etc., can solve problems such as changing the robot installation structure and increasing the cost of the robot, achieving the effect of flexible and convenient setting and ensuring the safety of human-robot collaboration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the technical solution of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. It should be understood that the specific examples described here are only used to explain the present invention, and are not limited to this example.
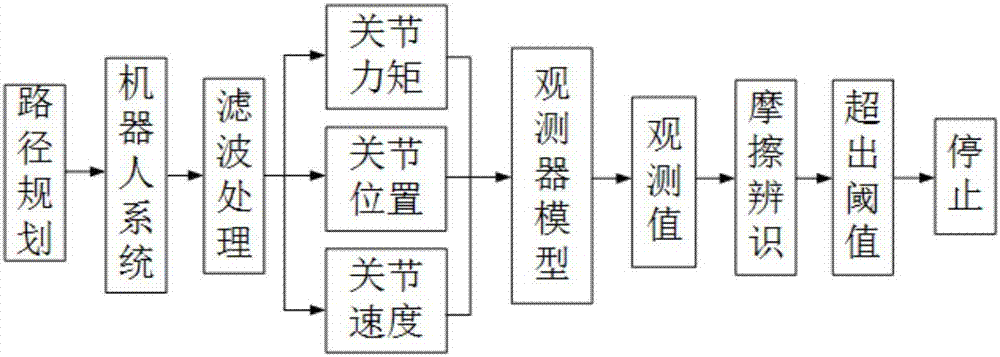
[0031] Such as figure 1 The shown sensorless collaborative robot collision detection method of the present invention comprises the following steps:
[0032] Step 1. Establish the dynamic model of the robot using the Lagrangian equation. The expression of the model is as follows:
[0033]
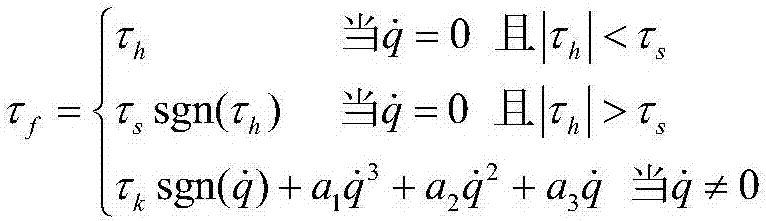
[0034] τ e =τ c +τ f (2)
[0035] In formula (1): q, are the joint angles, angular velocities, and angular accelerations of the revolving joints to be measured by the robot, respectively; M(q) is the matrix of inertial term coefficients of the robot, which is an n×n matrix, and n represents the number of revolving joints of the robot; Repre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More