

Target tracking system based on cooperation of UAV and unmanned vehicle
A target tracking and unmanned aerial vehicle technology, applied in the field of intelligent control, can solve the problems of local planning and insufficient accuracy, low target tracking efficiency, inability to perceive obstacles, etc., to reduce casualties, improve efficiency, and high safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
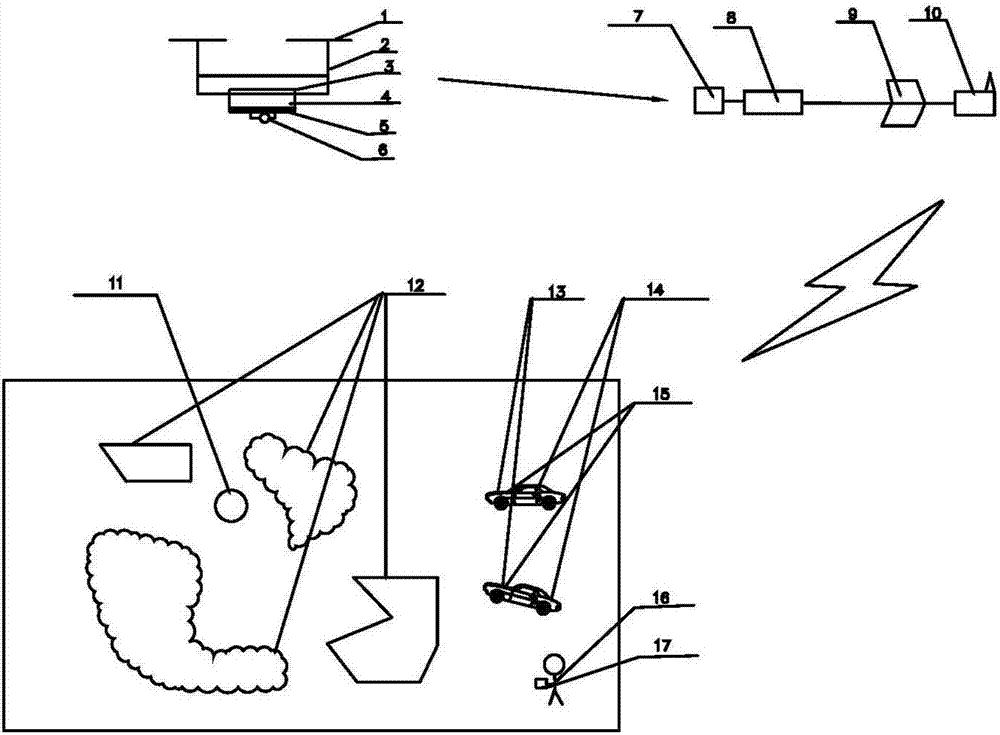
[0019] refer to figure 1 In this embodiment, a target tracking system based on the coordination of unmanned aerial vehicles and unmanned vehicles includes:
[0020] UAV 2: UAV 2 is a quadrotor UAV 2 composed of four wings 1, on which are installed a camera 6, an image transmission module 4, a control signal receiver 3 and a GPS positioning system, wherein the camera 6 Fixed on the cloud platform 5 below the UAV 2 fuselage with the image transmission module 4, the camera 6 is connected with the image transmission module 4, and the image transmission module 4 is connected with the ground signal receiver 7, and the image taken by the camera 6 has a position and The image of the characteristic information is transmitted to the ground signal receiver 7 via the image t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More