

SIFT feature detection optimization method based on local area substantial parameter indexes
A local area and parameter index technology, applied in image data processing, instruments, calculations, etc., can solve problems that affect matching accuracy, increase computational complexity, etc., and achieve the effect of improving convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below with reference to the accompanying drawings and examples.
[0041] The present invention starts from the statistical characteristics of SIFT feature points and randomly selects a limited number of feature points under the condition of fully ensuring uniform distribution, so as to meet the requirement of EKF convergence on the number of feature points and ensure the accuracy required for scene description.
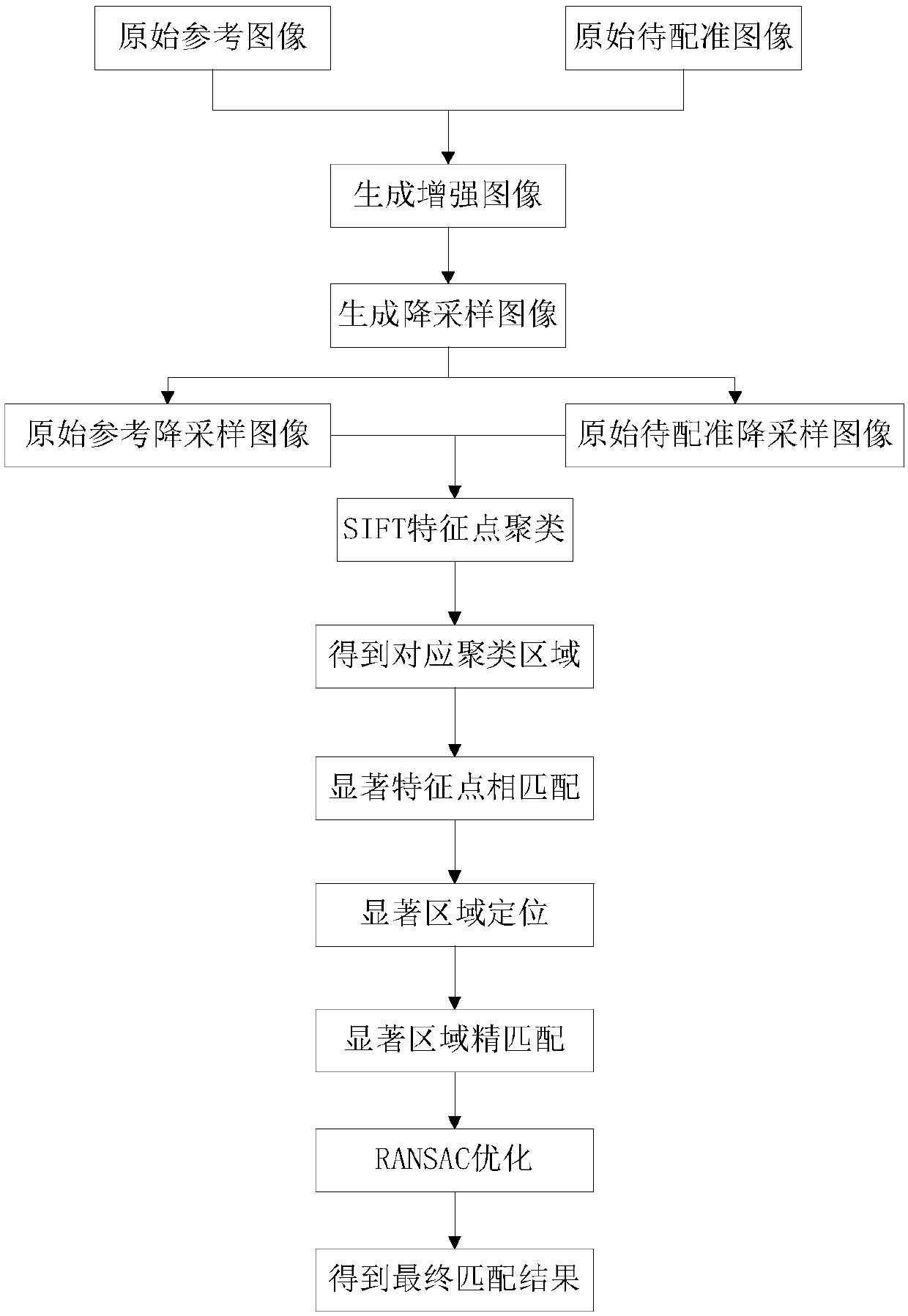
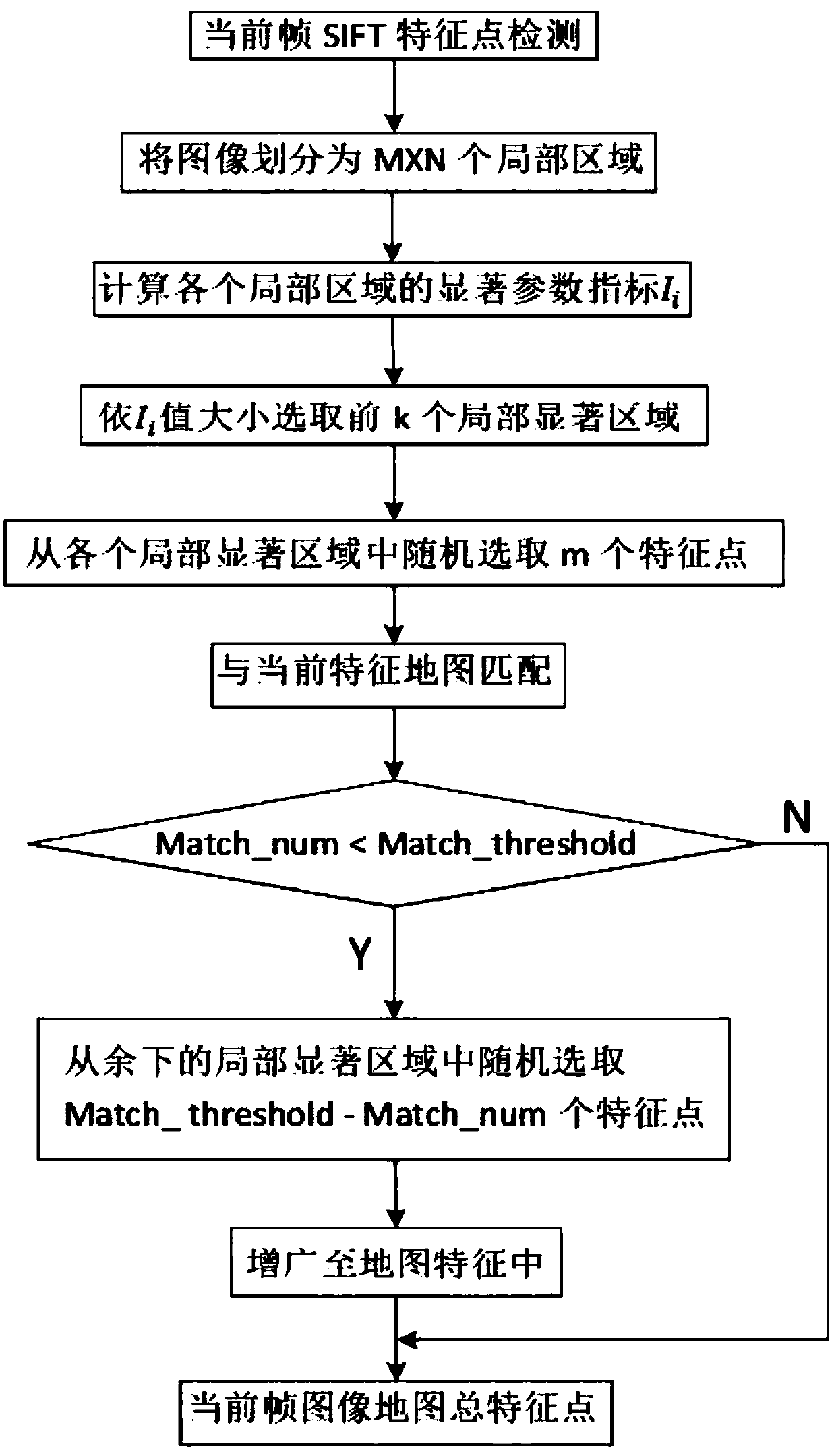
[0042] The present invention proposes a SIFT map feature point detection and optimization method based on local area salient parameter indicators, and its specific steps are as follows:
[0043] 1) For the current frame image, first detect the corresponding SIFT feature points.
[0044] 2) Divide the image into M×N local areas, and calculate the feature salient parameter index value I of each local area i , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More