

An indoor positioning method, a navigation method and a system
An indoor positioning and inertial navigation system technology, applied in the field of analysis and measurement control, can solve the problems of cumulative error of INS guidance mode, large non-line-of-sight error, and high cost of high-precision INS devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
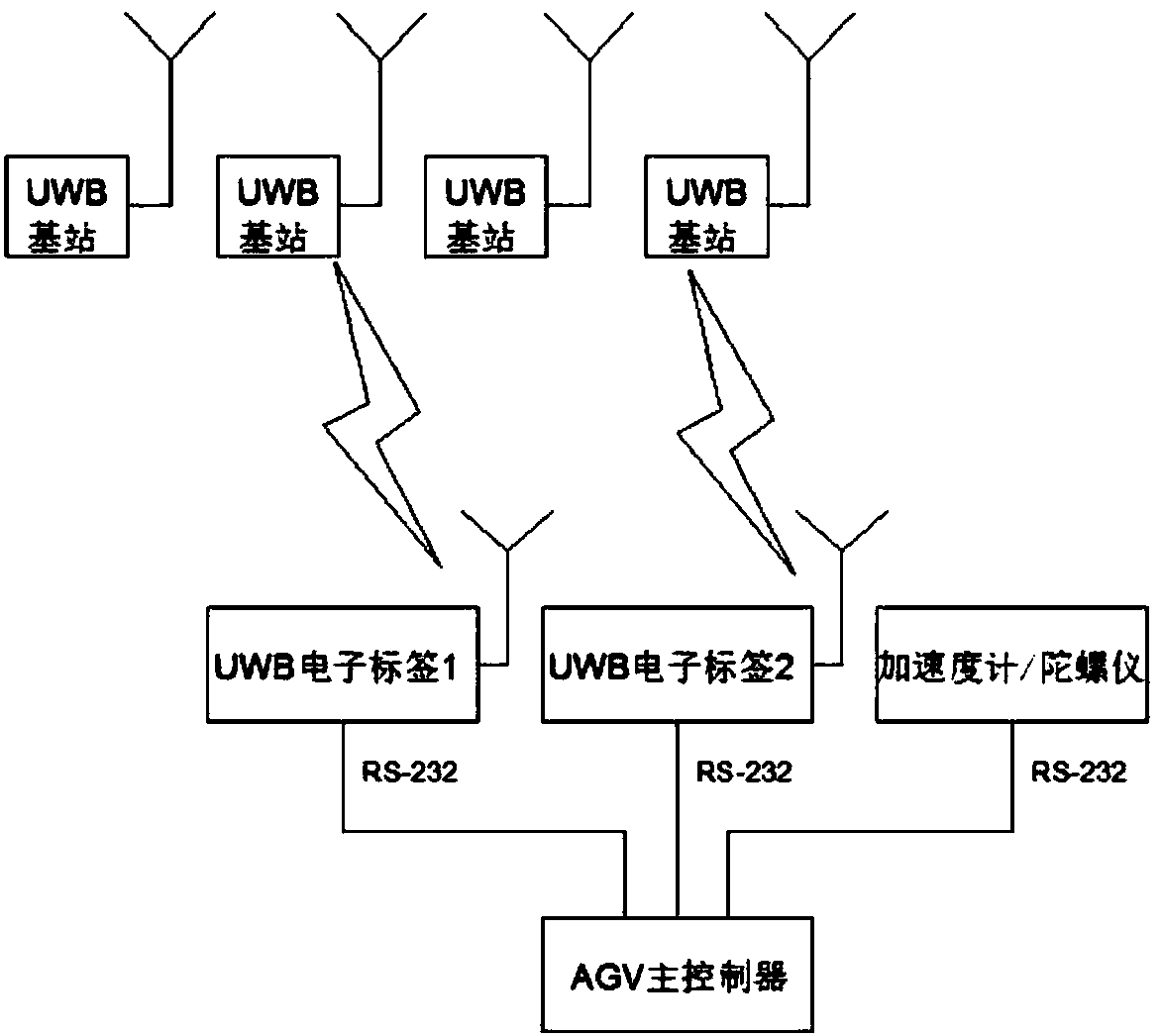
[0043] like figure 1As shown, it is a schematic structural diagram of the indoor positioning system provided in Embodiment 1 of the present application. The system includes an automatic guided vehicle AGV and at least 3 UWB base stations, wherein the AGV includes a main controller, an inertial navigation system INS and at least 2 UWB electronic tags:
[0044] INS is used to calculate the first positioning data and first attitude data of the AGV according to the three-axis angular velocity and three-axis acceleration values measured by the integrated three-axis gyroscope and three-axis accelerometer;
[0045] The first positioning data of the above-mentioned AGV is the position data of the AGV obtained from the INS system. Here, in order to distinguish it from the position data of the AGV obtained based on the distance data between the UWB electronic tag obtained by the UWB electronic tag and each UWB base station, it will be obtained from The position data of the AGV obtain...
Embodiment 2
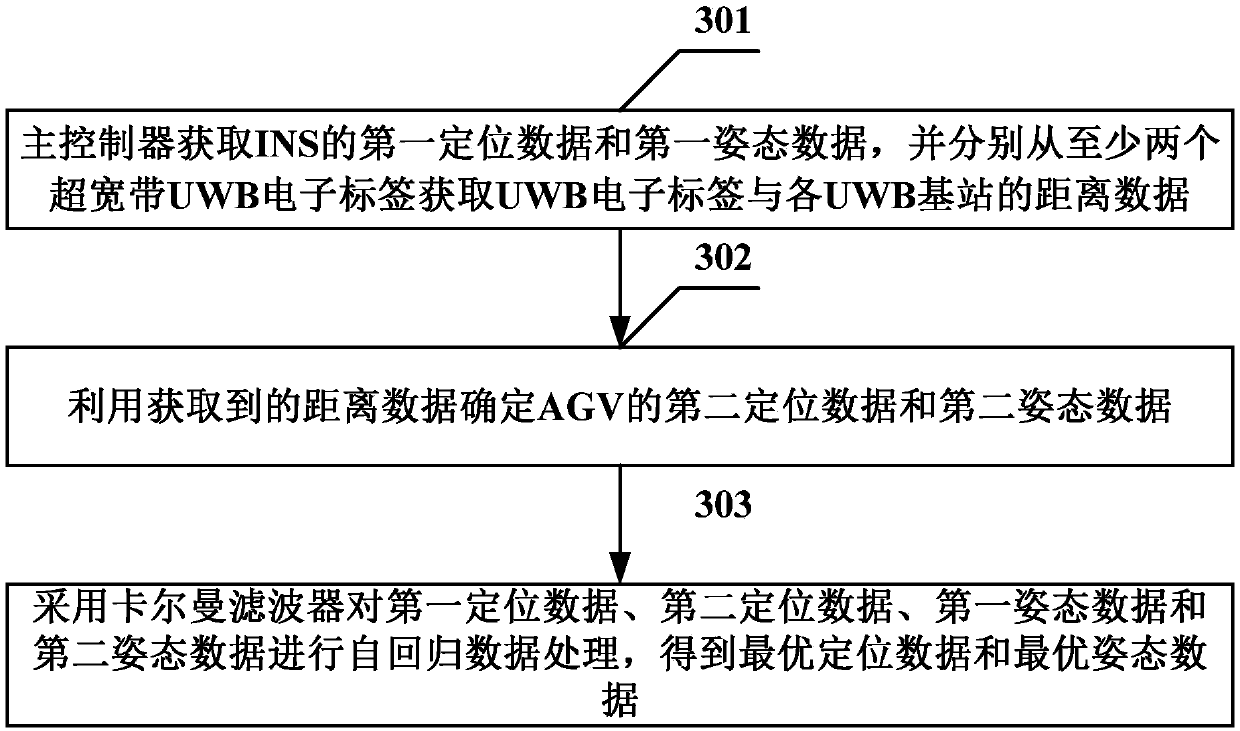
[0060] like image 3 As shown, it is a flow chart of the indoor positioning method provided in Embodiment 2 of the present application. This method is applied to the automatic guided transport vehicle AGV, and the AGV includes a main controller, an inertial navigation system INS and at least 2 UWB electronic tags, The method includes the following steps:
[0061] Step 301: the main controller obtains the first positioning data and the first attitude data from the INS, and respectively obtains the distance data between the UWB electronic tag and each UWB base station from at least two ultra-wideband UWB electronic tags;
[0062] Step 302: Using the acquired distance data to determine the second positioning data and the second attitude data of the AGV;
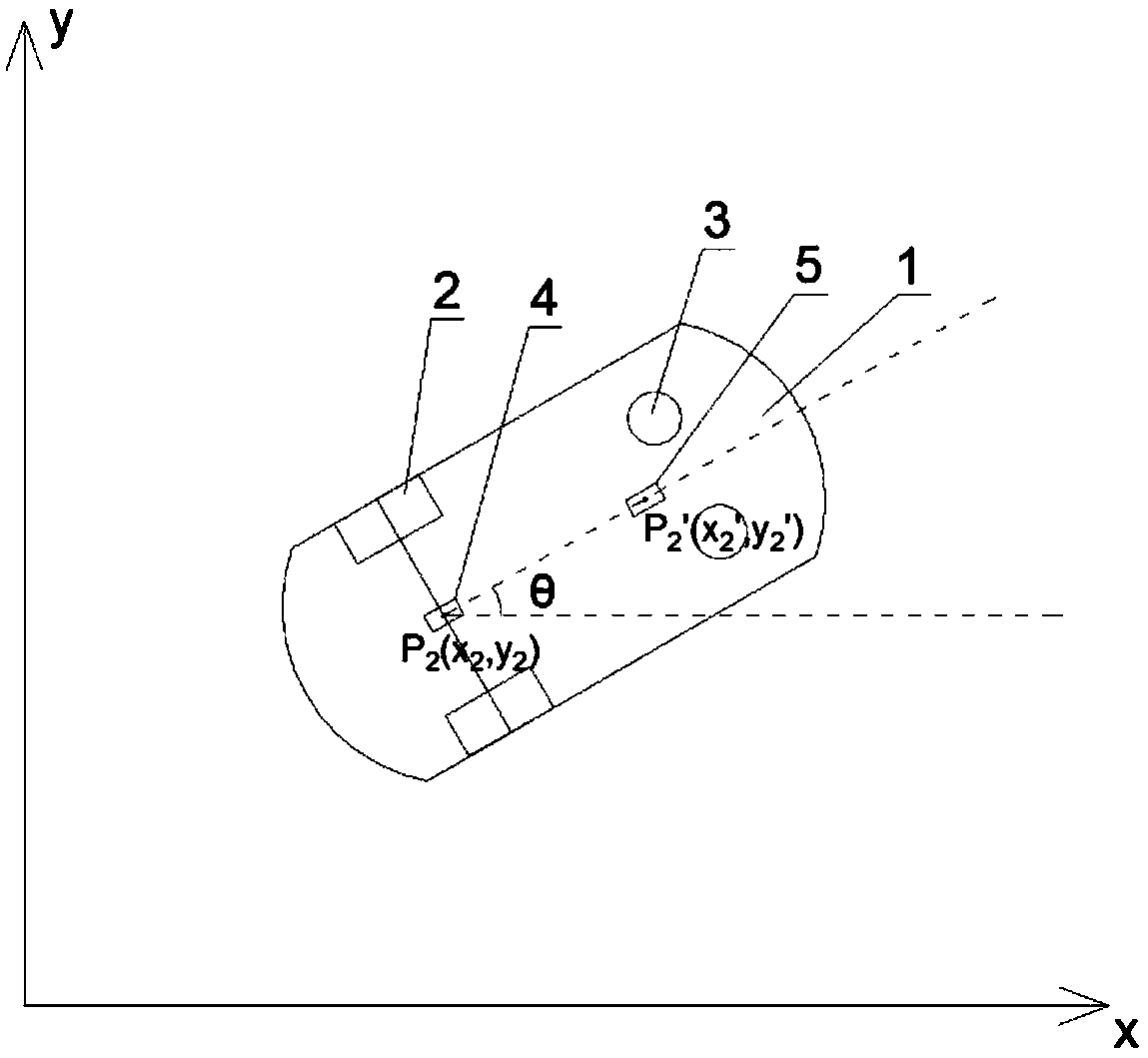
[0063] Preferably, the number of UWB electronic tags is 2, and the 2 UWB electronic tags are installed one after the other on the central axis of the AGV's movement direction, and at least one is installed at the central point ...
Embodiment 3
[0071] Based on the same inventive concept as that of Embodiment 1 and Embodiment 2, Embodiment 3 of the present application provides an indoor navigation system, its structural diagram is as follows Figure 5 As shown, the system includes: AGV and at least 3 UWB base stations, wherein the AGV includes a main controller, INS and at least 2 UWB electronic tags:
[0072] INS is used to calculate the first positioning data and first attitude data of the AGV according to the three-axis angular velocity and three-axis acceleration values measured by the integrated three-axis gyroscope and three-axis accelerometer;
[0073] UWB electronic tags are used to communicate with UWB base stations arranged around, and use communication data to calculate the distance to each UWB base station;
[0074] The main controller is used to obtain the first positioning data and the first attitude data from the INS, and obtain the distance data between the UWB electronic tag and each UWB base statio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More