

A robot movement control method, system and inertial sensor control device
A control method and robot technology, applied in measuring devices, instruments, navigation, etc., can solve problems such as strict equipment and environmental requirements, inertial sensor drift error, low precision and inaccurate judgment, and achieve good application prospects and solve attitude problems The effect of accurate angle and good online recognition effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
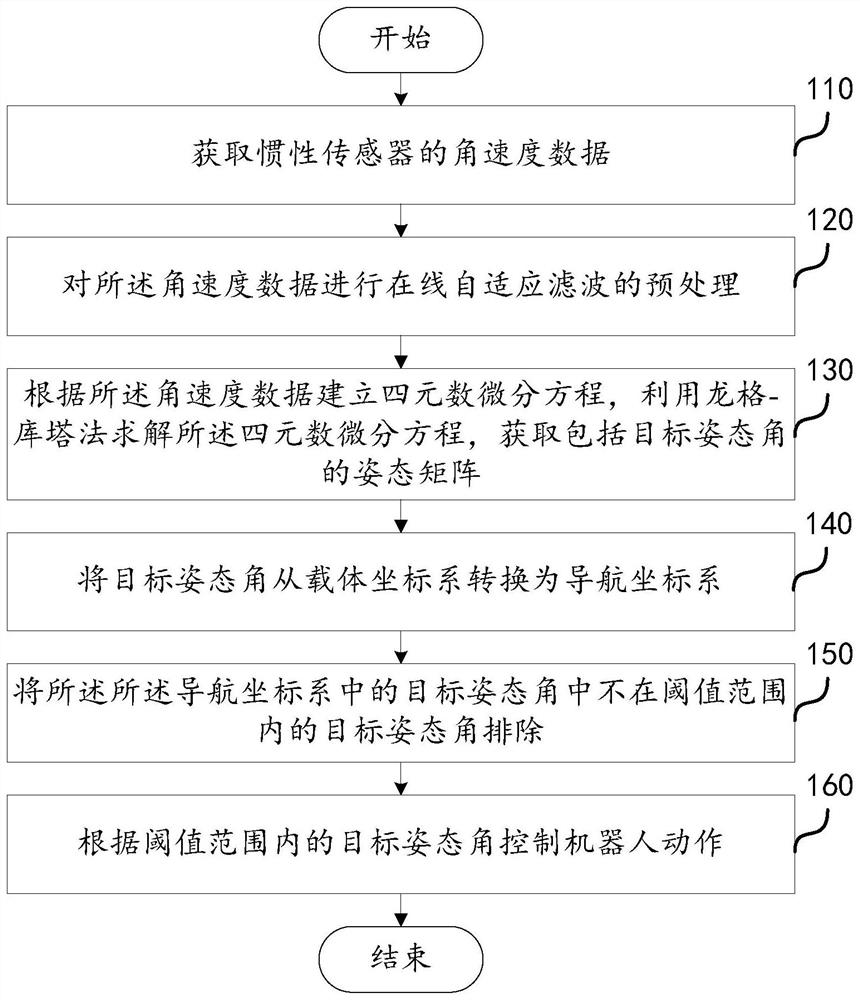
[0028] figure 1 A schematic flowchart of a robot movement control method provided by an embodiment of the present invention is given. Such as figure 1 As shown, the method includes:
[0029] S1, acquiring angular velocity data of an inertial sensor, wherein the inertial sensor can be worn on a user's finger;
[0030] S2, performing online adaptive filtering preprocessing on the angular velocity data;
[0031] S3, establishing a quaternion differential equation according to the angular velocity data preprocessed by online adaptive filtering, using the Runge-Kutta method to solve the quaternion differential equation, and obtaining an attitude matrix including the target attitude angle;
[0032] S4, converting the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More