

Object tracking method based on vision
An object and vision technology, applied in the field of object tracking, can solve problems such as low efficiency, increased calculation burden, and easy detection of wrong targets, etc., to achieve the effect of improving real-time performance, reducing filter drift, and good common object tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
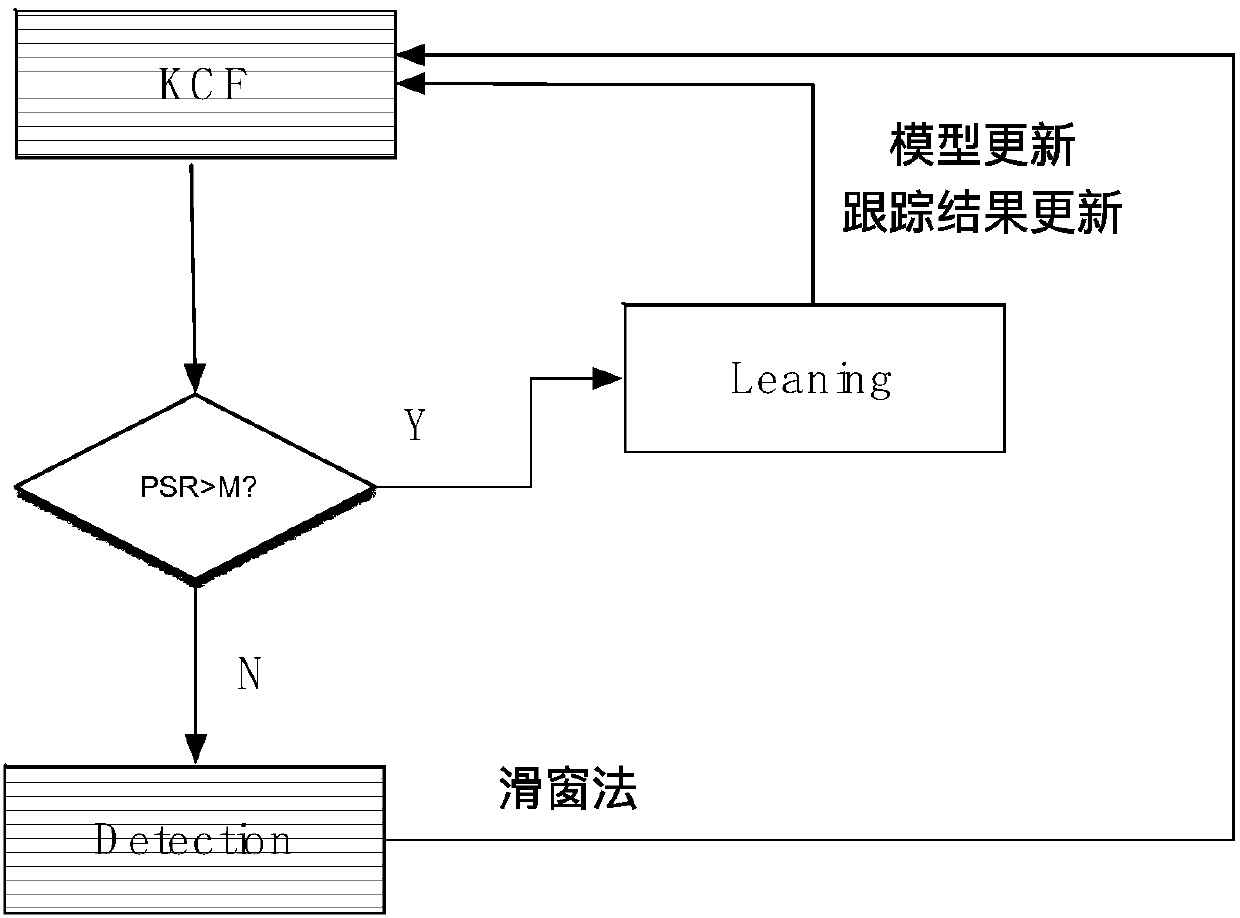
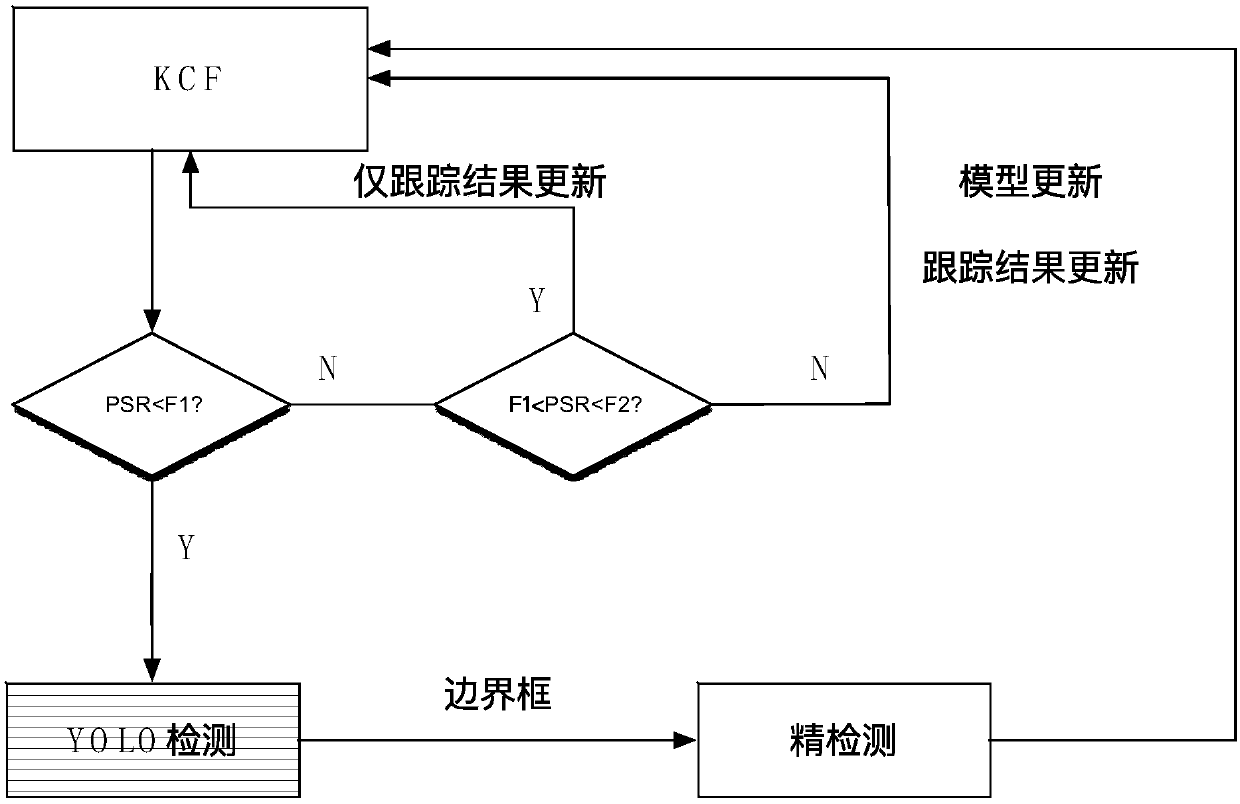
[0032] Attached below figure 1 and attached figure 2 The present invention is further described, but not limited to the present invention.
[0033] The KCF tracking process is as follows:
[0034] Correlation filtering trains a correlation filter based on the current frame information and the previous frame information, and performs correlation calculation with the newly input frame, and the obtained response graph is the predicted tracking result, as shown in the following formula 1:
[0035] f(z)=
[0036] where w represents the correlation filter model parameters, and z represents the image patch where the target is located.
[0037] The steps tracked by KCF are:
[0038] In the It frame, sample (add padding) around the current position pt, and train a regressor. This regressor computes the response for a small window of samples;
[0039] In the It+1 frame, samples are taken near the position pt of the previous frame, and the aforementioned regressor is used to judge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More