

A Hand-Foot Universal Mechanism for Multi-legged Robots
A technology of multi-legged robots and hands and feet, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as poor operating ability, and achieve the effect of simple mechanism, good grasping operation ability, and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
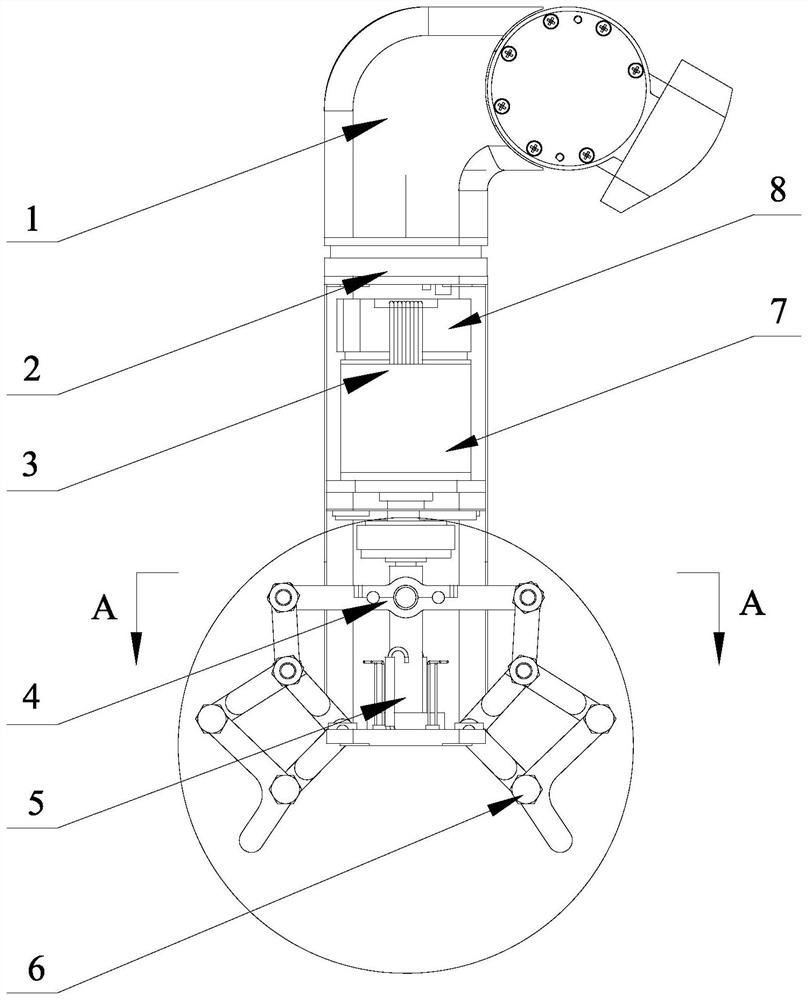
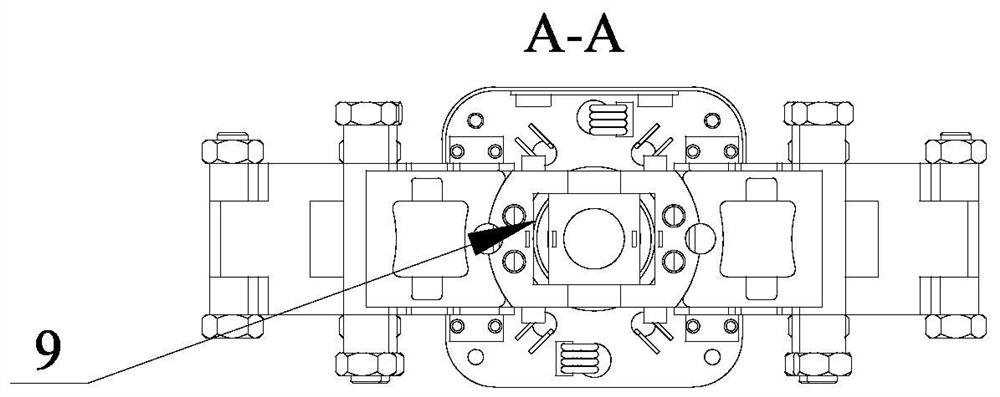
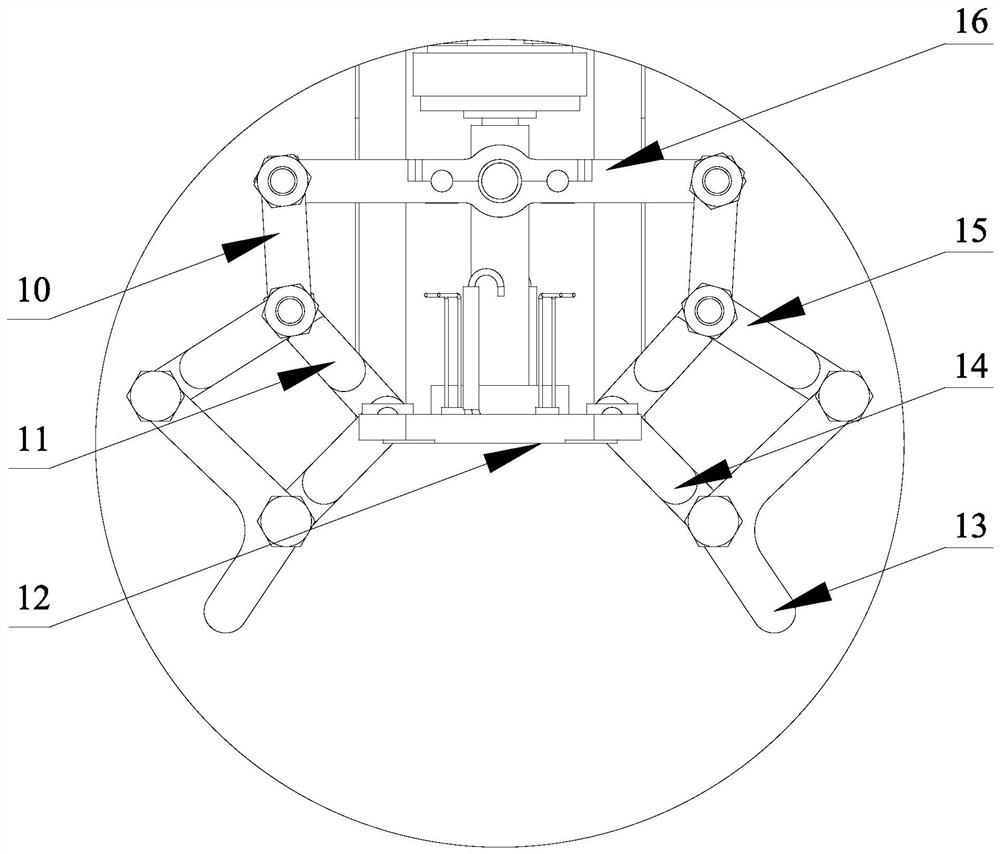
[0027] see figure 1 , figure 2 and image 3 Illustrates that a hand and foot universal mechanism for a multi-legged robot includes a leg 1, a docking module 2, a drive module 3, a passive compliance module 4 and an underactuated gripper module 6;
[0028] The docking module 2 is installed at the end of the leg 1, the driving module 3 is installed on the docking module 2, the passive compliance module 4 is driven by the driving module 3 to realize linear motion, and the underactuated gripper module 6 is driven by the passive compliance module 4 to realize the opening and closing movement .
[0029] The docking module 2 is used for the mechanical connection and electrical connection of the common mechanism of hands and feet; the passive compliance module 4 is driven by the driving module 3 to drive the opening and closing of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More