

Leading wire/conduit operating torque detection device of endovascular interventional surgical robot
A technology of interventional surgery and torque detection, which is applied in the field of medical equipment manufacturing, can solve the problems of insufficient online detection and research, and achieve the effect of avoiding transmission friction and simplifying the structure of the device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the accompanying drawings and examples.
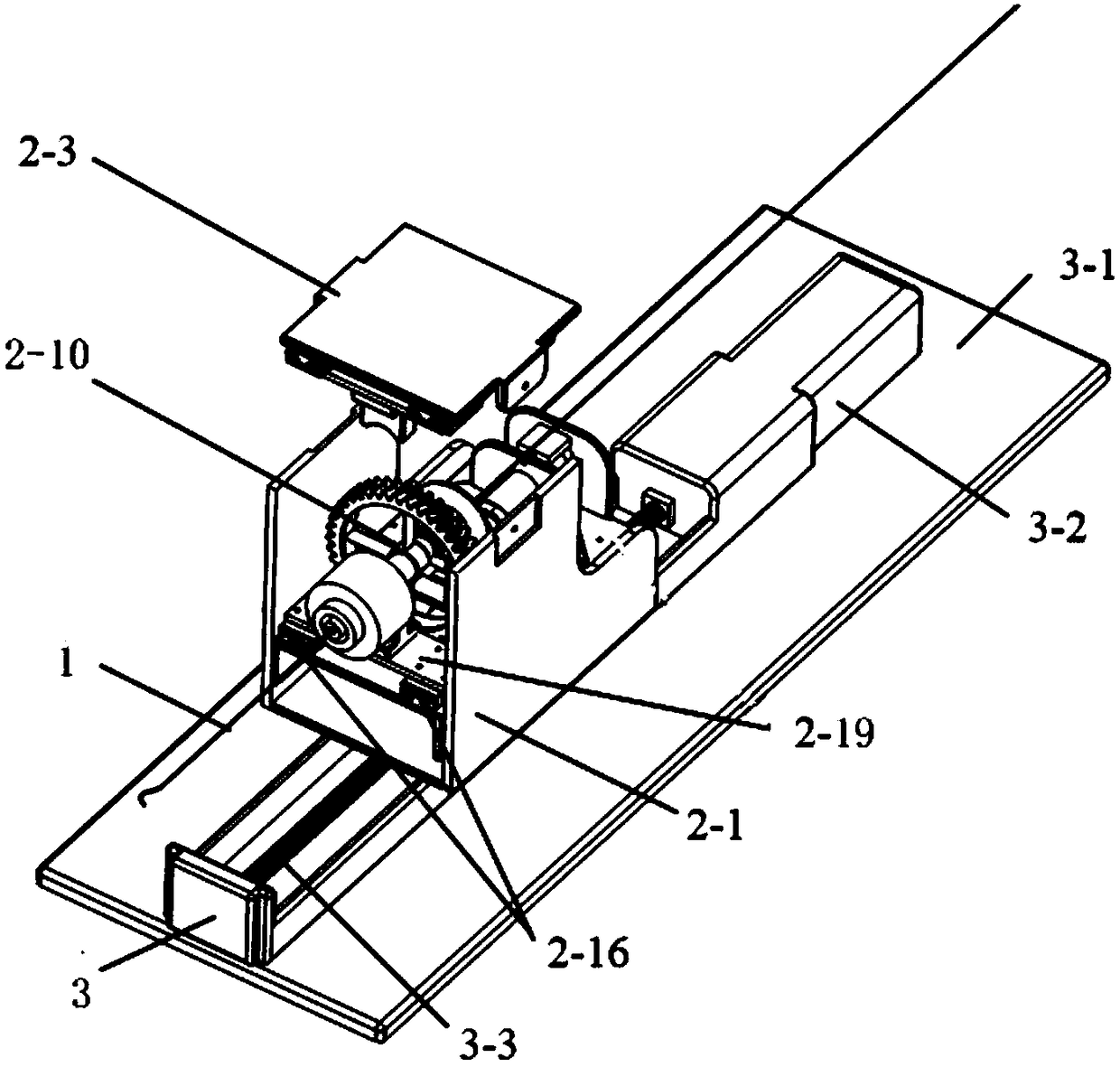
[0030] This embodiment provides a device for detecting the operating torque of a robot guide wire / catheter for intravascular interventional surgery. For the guide wire or catheter, the guide wire 1 is taken as an example in this embodiment, see the attached figure 1 , the device is integrally installed on the axial push mechanism 3 of the intravascular interventional surgery robot;
[0031] The axial pushing mechanism 3 comprises: a bottom plate 3-1, an axial motor 3-2 and a lead screw 3-3; the axial motor 3-2 and the lead screw 3-3 are fixedly mounted on the bottom plate 3-1, and The leading screw 3-3 is connected with the output shaft of the axial motor 3-2, and the leading screw slider matched with it is installed on the leading screw 3-3; the axial motor 3-2 rotates by driving the leading screw 3-3. Make the lead screw slider move linearly along the 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More