

Device for detecting near-end force and torque of catheter of minimally invasive vascular interventional surgical robot
A technology for interventional surgery and torque detection, applied in surgical robots, surgical manipulators, catheters, etc., can solve the problems of complicated catheter speed detection methods, low sensitivity, and insufficient accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
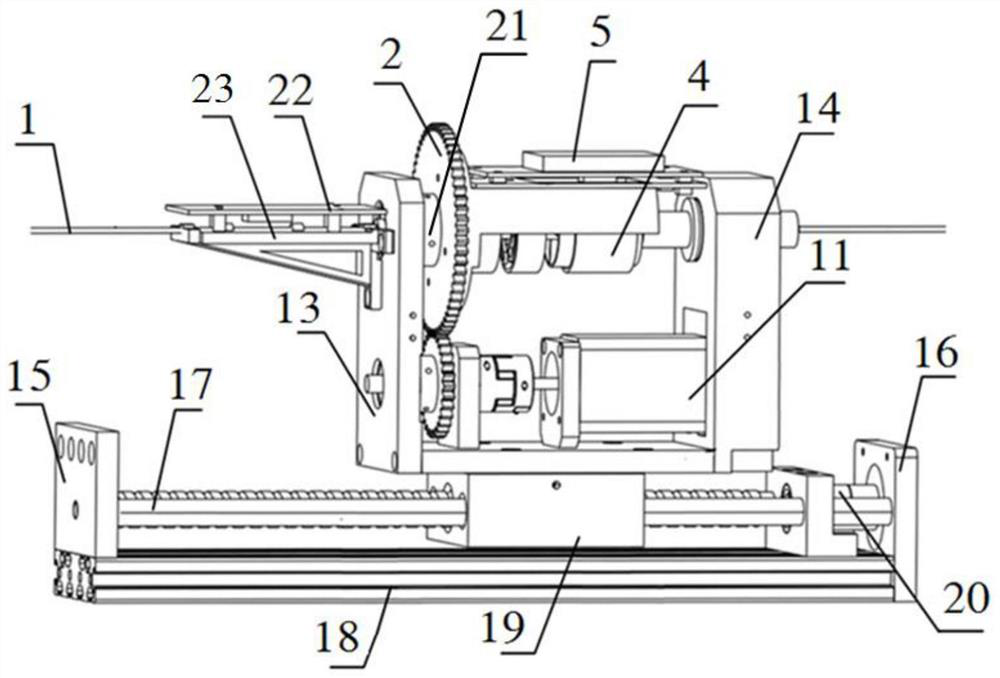
[0033] Embodiment 1: as figure 1 As shown, a minimally invasive vascular interventional surgery robotic catheter proximal force torque detection device is mainly composed of a catheter 1, a wireless photoelectric sensor PCB 5, and a torsional transmission mechanism that drives the catheter 1 to rotate.
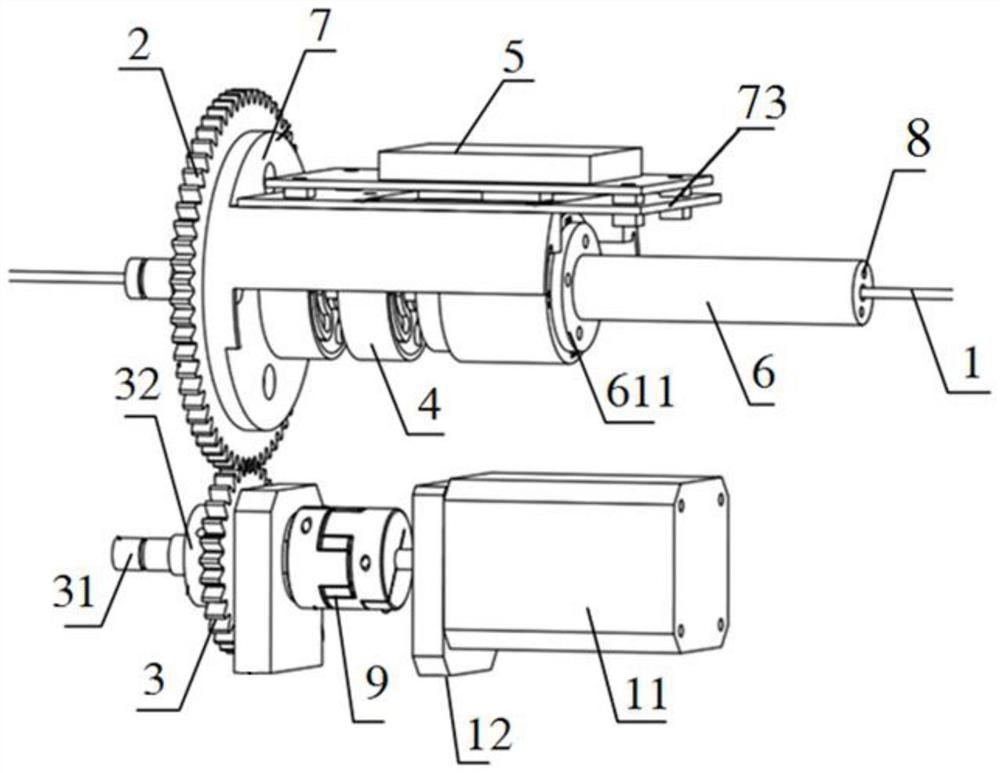
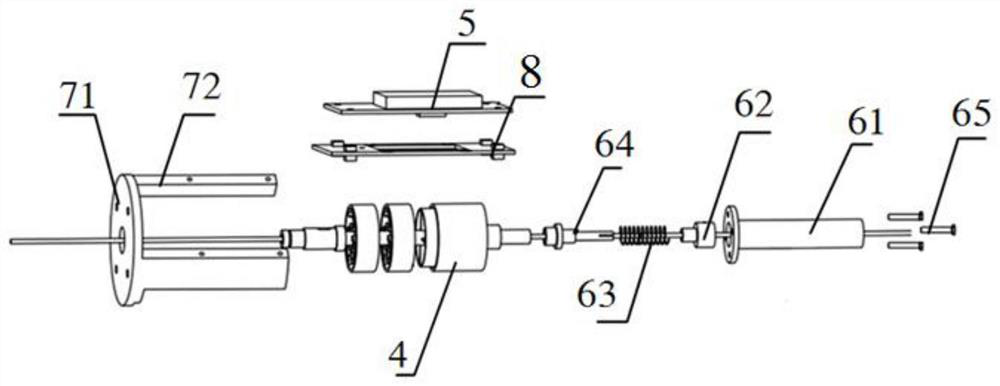
[0034] Among them: such as figure 1 , 2 As shown, the torsion transmission mechanism includes a torsion motor 11, a rotating shaft 31, a transmission pinion 3, a transmission bull gear 2, a flexible flexure 4 and a catheter clamping device 6;
[0035] Specifically: the output end of the torsion motor 11 is connected to the rotating shaft 31 through the coupling 9, and the rotating shaft 31 is connected to the transmission pinion 3; the transmission pinion 3 is meshed with the transmission bull gear 2 , the transmission bull gear 2 is connected with the flexible flexure 4, and the flexible flexure 4 is connected with the conduit clamping device 6; the conduit 1 is penetrated ...
Embodiment 2
[0042] Embodiment 2: as figure 1 , Figure 7 As shown, a device for detecting force and torque at the proximal end of a robot catheter for minimally invasive vascular interventional surgery differs from Embodiment 1 in that the twist transmission mechanism is integrally arranged on the catheter pushing device. The specific structure is set as follows: the catheter pushing device includes a first mounting plate 15, a second mounting plate 16, an axial motor 20 and a screw mandrel 17, and the screw mandrel 17 is arranged on the first mounting plate 15 and the second mounting plate 16 Above, the axial motor 20 is used to drive the screw 17 to rotate, and the screw 17 is equipped with a screw slider 19 cooperating with it, and the screw slider 19 is slipped and installed on the linear guide rail 18 Above, the torsion transmission mechanism is fixed on the screw slider 19 through the bottom support plate; the left side support plate 13 of the torsion transmission mechanism is also...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More