

Master-slave heterogeneous teleoperation control system based on ROS
A teleoperation control, master-slave technology, applied in the field of robot master-slave teleoperation, can solve the problems of poor immersive experience, limited selection of slave device types, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
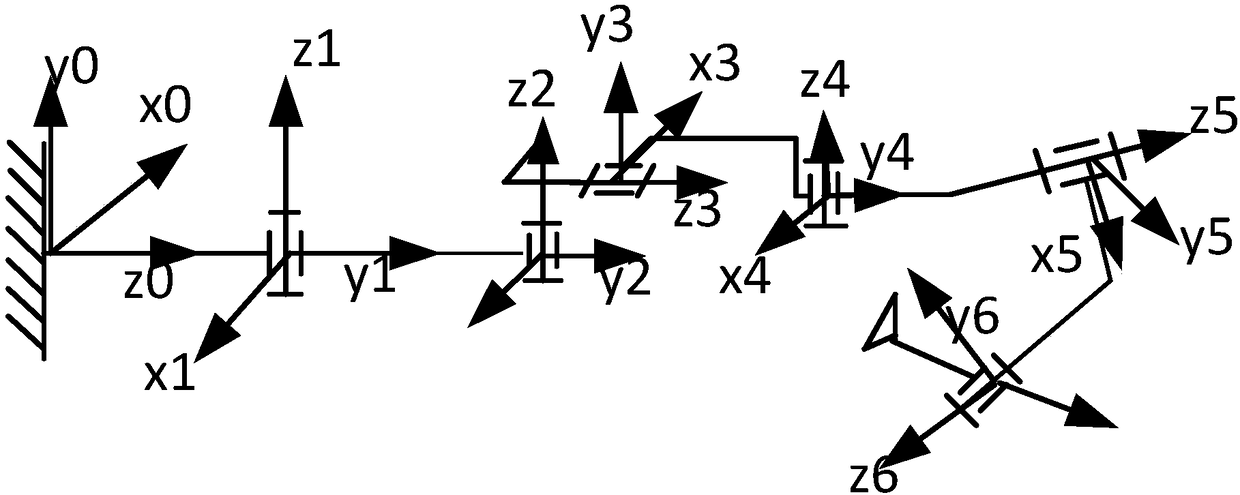
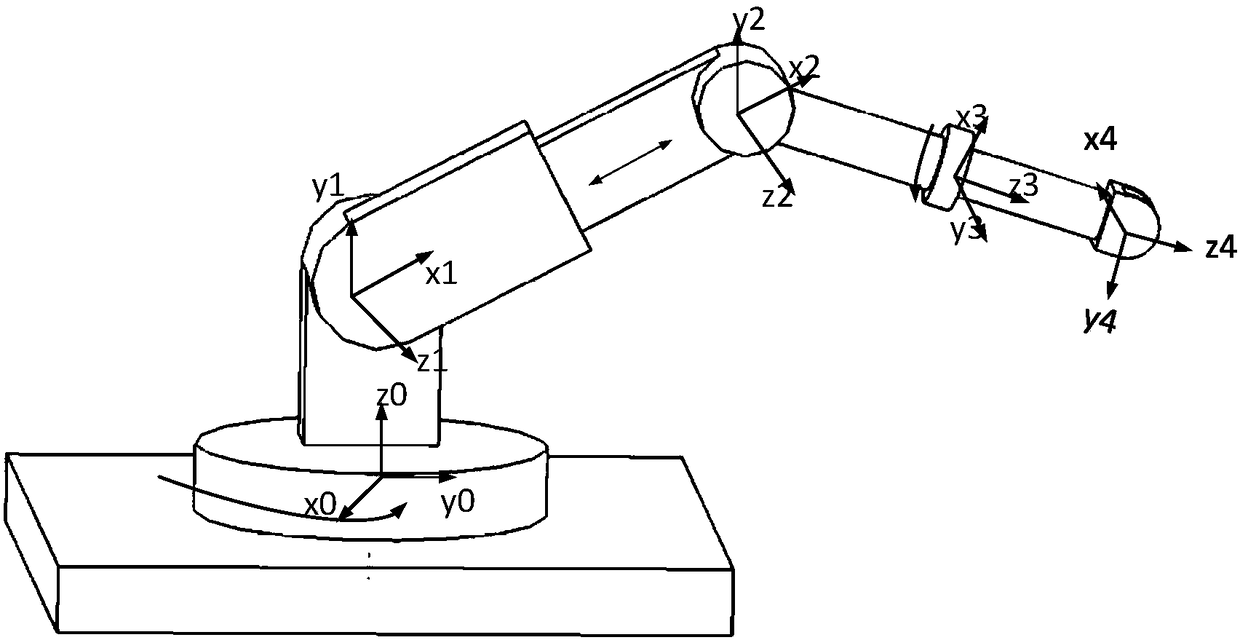
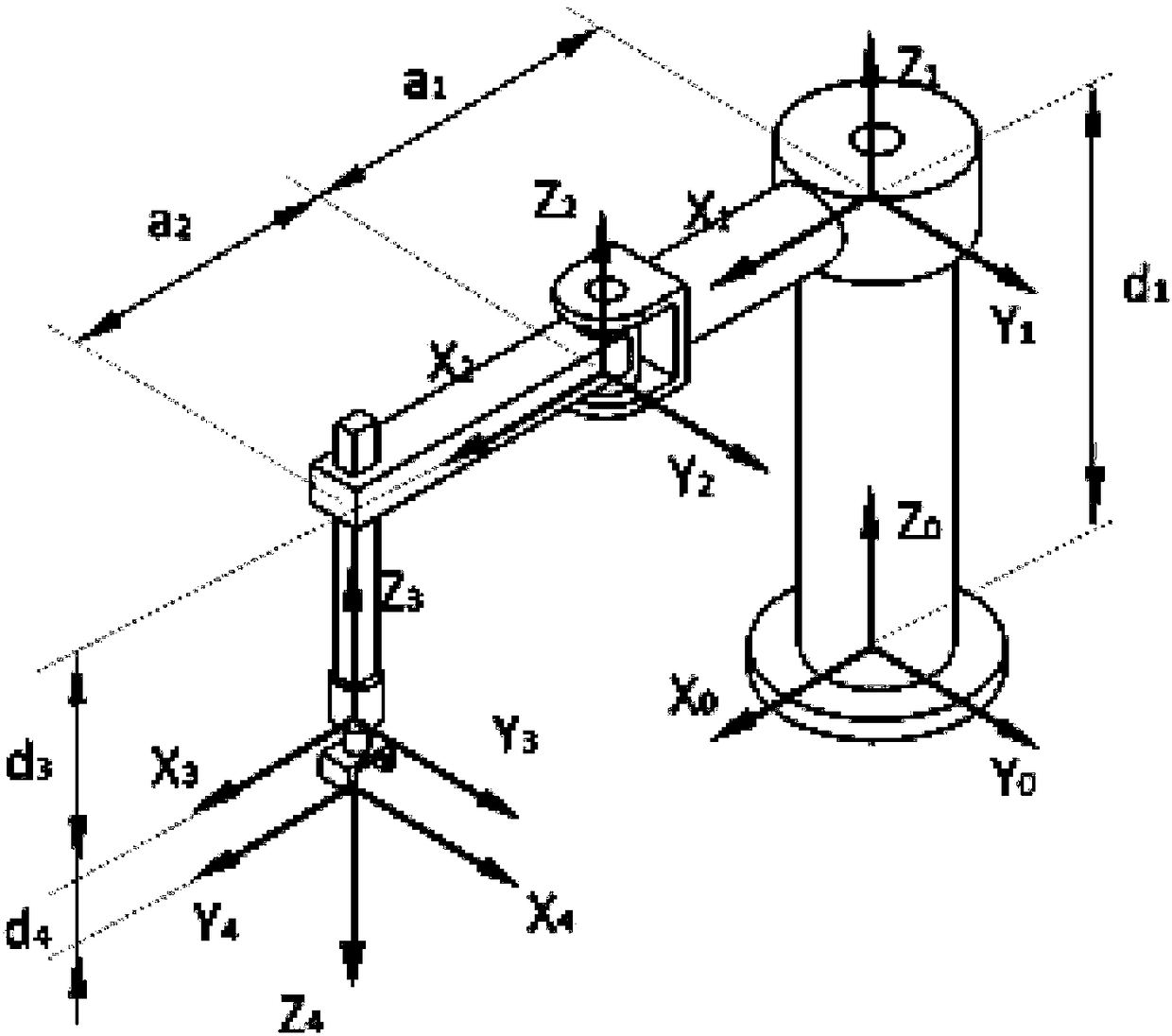
[0035] Such as Figure 1 to Figure 6 As shown, the master-slave heterogeneous remote operation control system based on ROS described in this embodiment includes a master-end operator (referred to as master-hand), a master-end controller, a teaching box, a slave-end controller, and multiple slaves. In the end module, the master operator communicates with the teaching box serially through the master controller, and the slave controller connects with the teaching box through a network cable to establish a local area network to realize the data interaction between the slave controller and the teaching box. The end module realizes motion control through the slave end controller; each slave end module includes a PMAC motion controller, a motor driver and a slave end manipulator (referred to as the slave hand); the PMAC motion controller and the slave end controller are connected through a network cable, and the PMAC moves The controller drives the slave arm through the motor driver; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More