

Lane deviation control assisting method based on steering and braking extendable joint
A lane departure and auxiliary control technology, applied in neural learning methods, biological neural network models, neural architectures, etc., can solve problems such as low road adhesion coefficient and poor auxiliary effects, so as to reduce human-machine conflicts and mutual interference Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
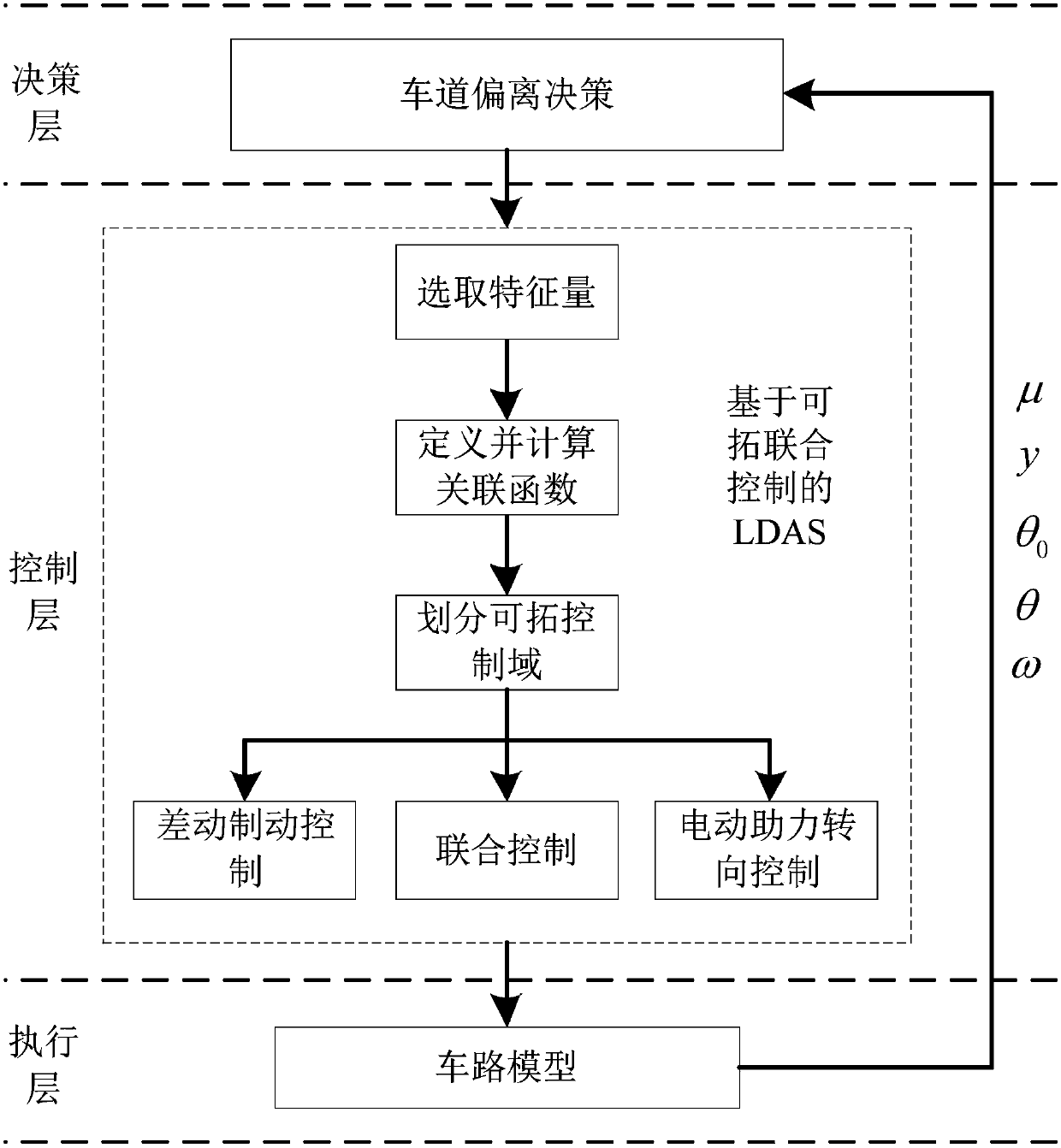
[0041] This embodiment provides a lane departure assistance system based on the extension combination of steering and braking, such as figure 1 As shown, it includes the decision-making level organization, the control level structure, and the execution level structure.
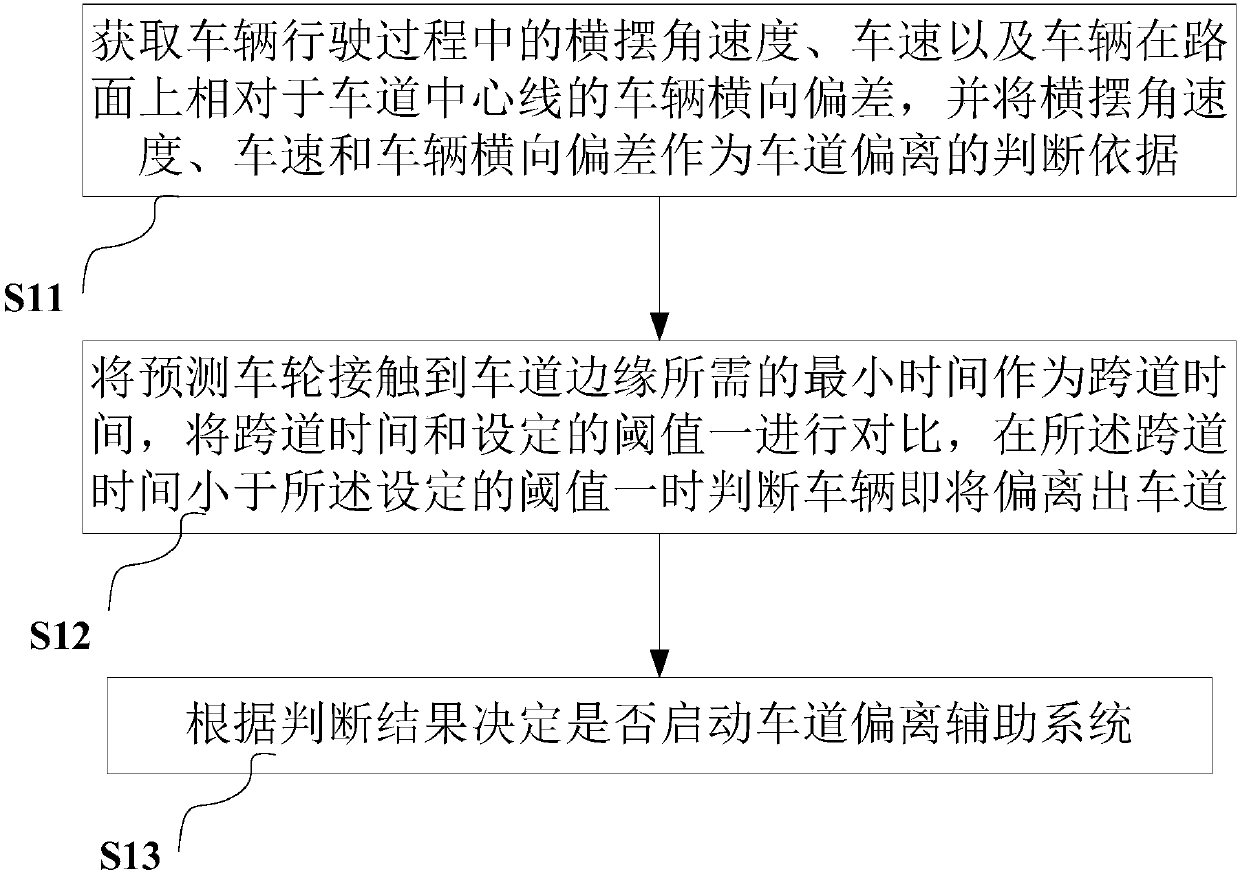
[0042] 1. Decision-making institutions are used to make lane departure decisions. The lane departure judgment methods adopted by decision-making institutions are as follows: figure 2 shown, including the following steps.
[0043] Step S11: Obtain the yaw rate ω, vehicle speed v and the vehicle lateral deviation y of the vehicle on the road relative to the centerline of the lane during the driving process of the vehicle, and use the yaw rate ω, vehicle speed v and vehicle lateral deviation y as the lane departure Judgments based.
[0044] Step S12, taking the minimum time required for the predicted wheel to touch the edge of the lane as the crossing time, comparing the crossing time with the set threshold o...
Embodiment 2
[0132] see Figure 15 , the present embodiment provides a specific lane departure assistance control method based on the extension combination of steering and braking, which includes the following steps.
[0133] Step S51, judging whether the lane deviates, and activating the lane departure assistance system when it is judged that the lane deviates. For the specific implementation of this step, please refer to the lane departure judging method described in steps S11 to S13 of Embodiment 1, which will not be described in detail here.
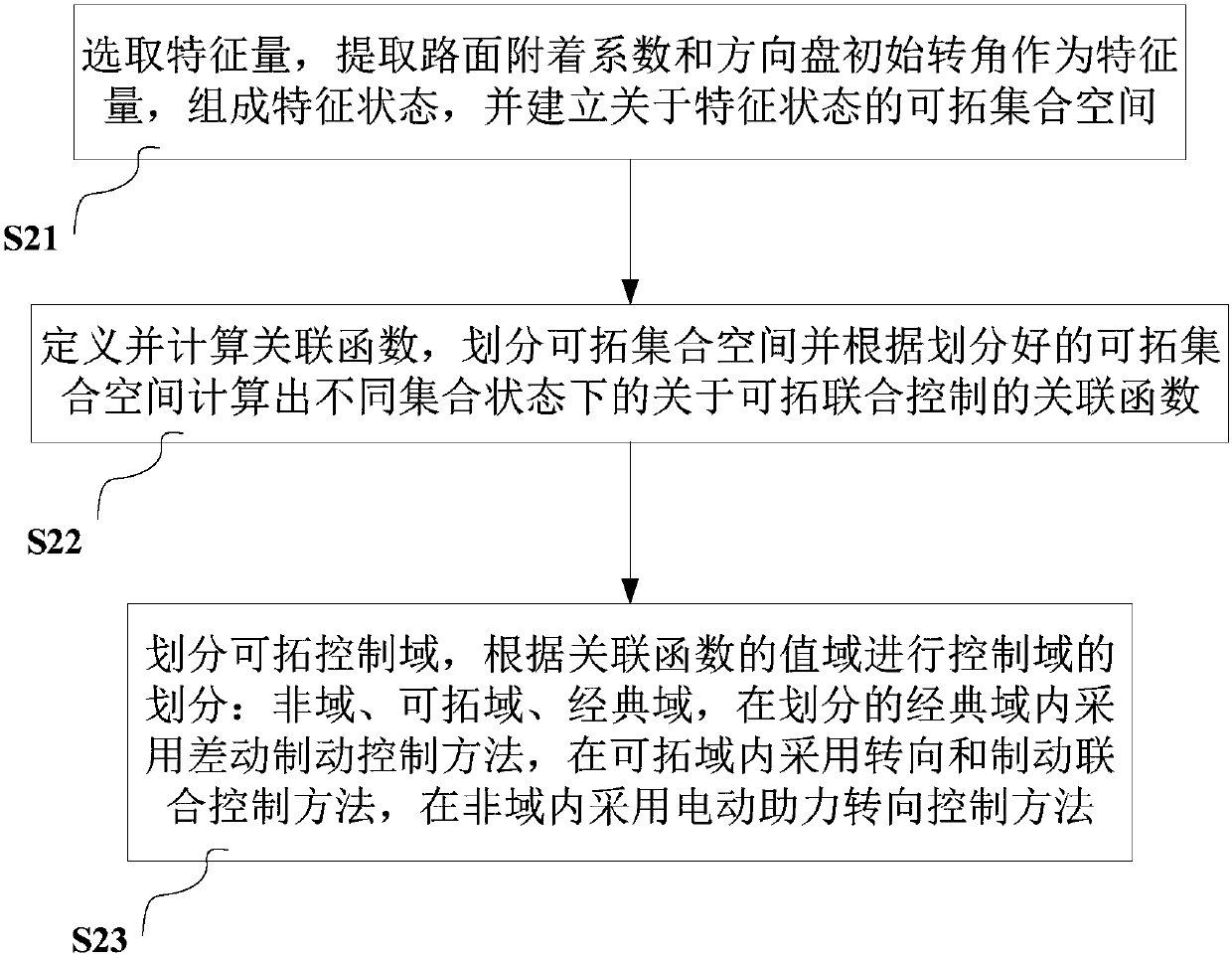
[0134] Step S52, select the feature quantity, extract the road surface adhesion coefficient μ and the initial steering wheel angle θ 0 As a characteristic quantity, the characteristic state S(μ,θ 0 ), and establish the characteristic state S(μ,θ 0 ) extension set space. For the specific implementation of this step, please refer to step S21 of Embodiment 1, which will not be described in detail here.
[0135] Step S53, define and calculate the ...
Embodiment 3
[0140] see Figure 16 , the present embodiment provides a specific lane departure assistance control device based on the extension combination of steering and braking, which includes the following components.
[0141] The lane departure module is used to execute step S51 to judge whether the lane deviates, and activate the lane departure assistance system when the lane departure is judged.
[0142] Feature quantity selection module, which is used to execute step S52, select feature quantity, extract road surface adhesion coefficient μ and steering wheel initial rotation angle θ 0 As a characteristic quantity, the characteristic state S(μ,θ 0 ), and establish the characteristic state S(μ,θ 0 ) extension set space.
[0143] A correlation function definition and calculation module, which is used to execute step S53, define and calculate correlation functions, divide the extension set space and calculate the correlation functions about extension joint control in different set s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More