

A method based on deep learning to obtain the position and attitude of the image city
A technology for acquiring images and deep learning, which is applied in the field of acquiring the position and attitude of images within the city based on deep learning, can solve the problem of time-consuming calculation process of RANSAC, and achieve the effect of enriching the location information of pictures and reducing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Below in conjunction with embodiment and accompanying drawing, further illustrate the present invention.
[0044] 1. Overall process design of the invention
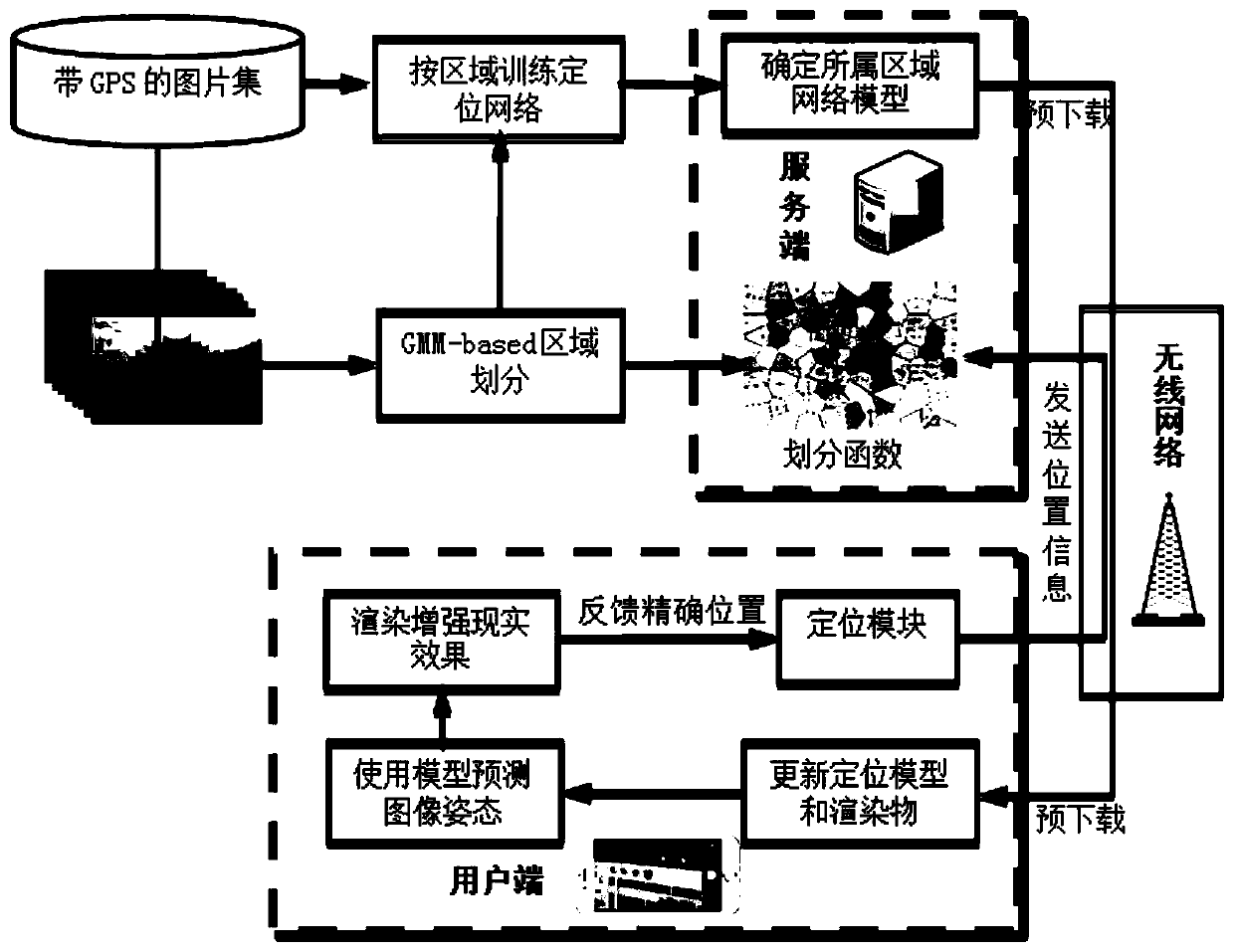
[0045] The present invention designs an implementation system based on deep learning to obtain the position and attitude of the image within the city range on the PC side. The frame diagram is as follows figure 1 shown. The whole invented system is divided into online part and online part. The offline part is mainly on the server side. The training area division learner divides the whole city into sub-areas, and then uses the migration learning method to train the proposed pose regression and scene classification network for each sub-area. The online part is mainly on the mobile client. After the user arrives in a certain area, the server sends the GPS or the geographical location of the mobile phone base station to the server. The server determines the area (scenario) to which the user belongs according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More