

Geographical coordinate positioning system and method based on 3D point cloud aerial photographing images
A technology of geographic coordinates and positioning methods, applied in image data processing, image analysis, navigation and other directions, can solve the problems of poor positioning accuracy, large amount of data, low precision positioning efficiency, etc., and achieve accurate and simple conversion and high stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0059] Embodiment 1 Calculate geographic coordinates from pixel coordinates
[0060] Calculating the geographic coordinates corresponding to the point from the pixel coordinates of the image is a key step in inspection projects. Both target detection and recognition are processed on the original image. After the pixel coordinates of the target are locked on the image, the geographic coordinates of the point need to be calculated.
[0061] see Figure 4 , after the image is preprocessed, the 3D point cloud of the image is established by SFM;
[0062] The pentagon in the figure is the detected abnormal target point, and the dots around the abnormal target point are the reference points closest to the target point calculated by the Euclidean distance. These points can also express the height and position of the target point most accurately, that is, determine The geographic location of the target point, after determining the reference point set, can establish a one-to-one corre...
Embodiment 2
[0066] Embodiment 2 calculates pixel coordinates from geographic coordinates
[0067] Contrary to Embodiment 1, this embodiment calculates the position of the geographic coordinate in pixel coordinates when the geographic coordinate is known. In inspection applications, it is often necessary to mark oil wells, electric towers, pipelines, etc. with known geographic coordinates in the original image, and use this as the location and constraint of the detection range.
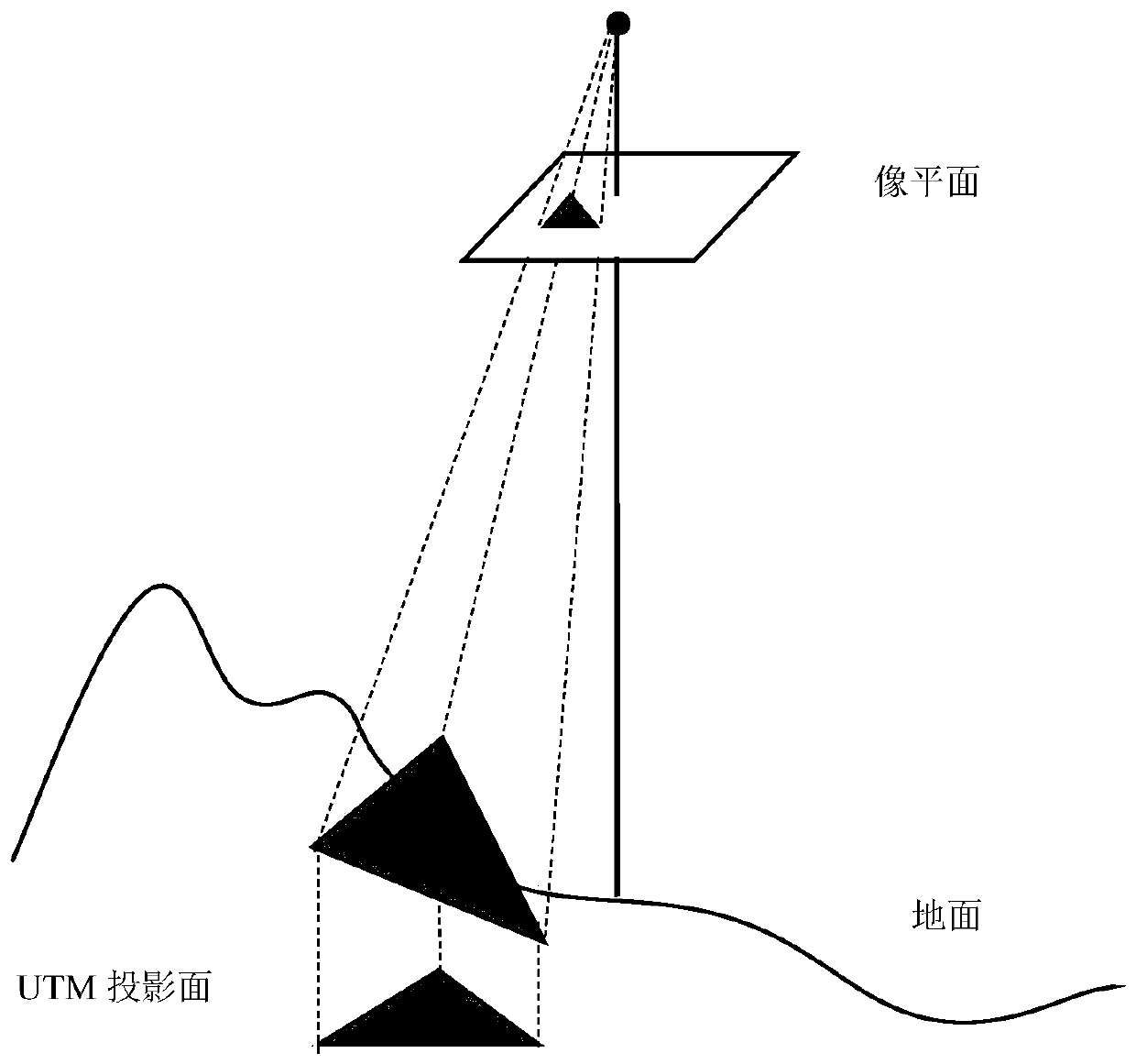
[0068] see Figure 5 , the geographic coordinates of a pipeline are known, and the position and direction of the pipeline need to be marked on the image. After the image is preprocessed, the 3D point cloud of the image is established through SFM;
[0069] Project the 3D point cloud into the UTM coordinate system; according to the known geographic coordinates of a pipeline, find the reference point set closest to the geographic coordinates on the UTM plane, Figure 5 The hollow dots are the feature points in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More