

Space occupation estimation method and device
A technology for calculating space and space, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. error, improve accuracy, reduce the effect of estimation bias
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
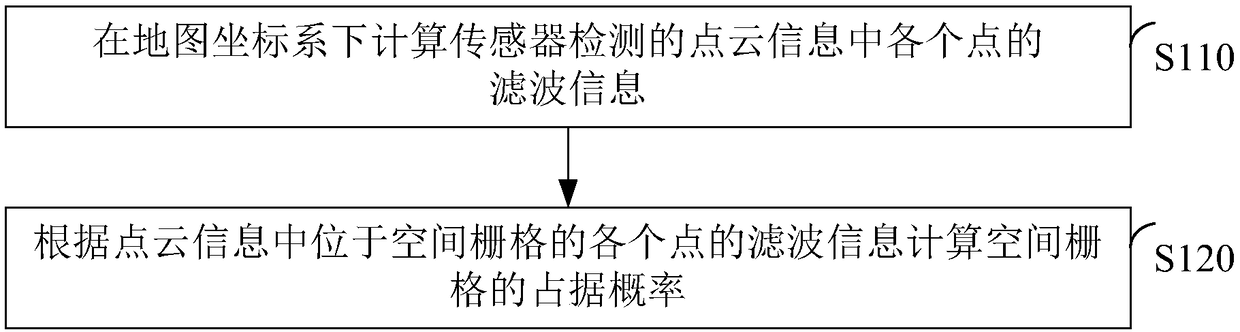
[0028] figure 1 is a flow chart of a method for estimating space occupancy according to an embodiment of the present invention, and the method can be used in an automatic driving system, such as an automatic driving system of a robot or a vehicle, such as figure 1 As shown, the method may include the following steps.
[0029] In step S110, the filter information of each point in the point cloud information detected by the sensor is calculated in the map coordinate system.
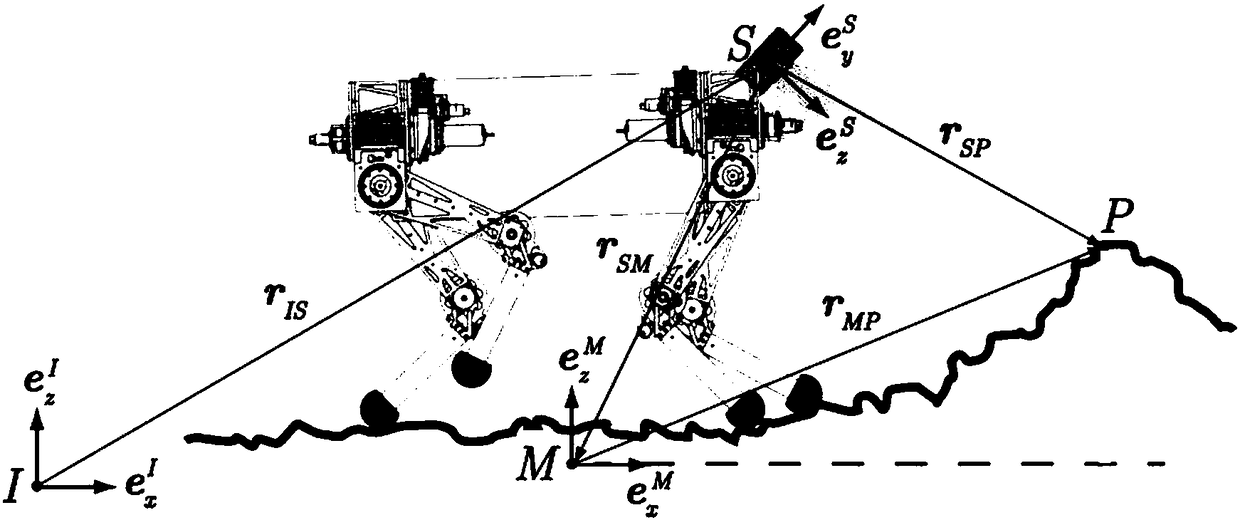
[0030] Wherein, the map coordinate system is fixed relative to the position of the sensor, and the attitude information of the point cloud information detected by the sensor is consistent in the map coordinate system and the world coordinate system.
[0031] For example, in figure 2 In the environment shown, S point represents the sensor, the sensor coordinate system takes S point as the origin, and the stationary world coordinate system takes I point as the origin, r IS is the vector from point I to po...
Embodiment 2
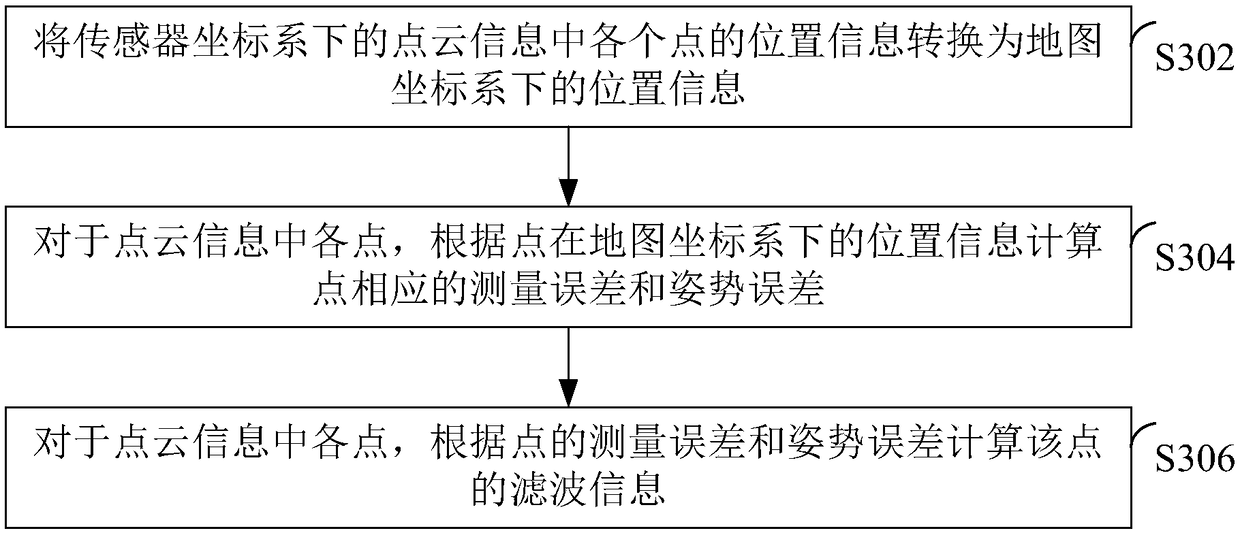
[0037] image 3 is a flowchart of the process of calculating filtering information according to an embodiment of the present invention, such as image 3 As shown, the calculation of the filter information of each point in the point cloud information detected by the sensor in the map coordinate system may include the following steps.
[0038] In step S302, the position information of each point in the point cloud information in the sensor coordinate system is converted into position information in the map coordinate system.
[0039] Wherein, the sensor coordinate system is a coordinate system established according to the position of the sensor.
[0040] For example, in figure 2 In the environment shown, the position information of the point P in the point cloud information in the map coordinate system is shown in formula 1.
[0041] P m = mr MP = mr SP -mr SM =Cms(q|t)×sr SP -mrSM Formula 1
[0042] Among them, mr MP is the position of point P in the map coordinate ...
Embodiment 3
[0053] Figure 4 is a flowchart of the process of calculating the occupancy probability of a spatial grid according to the filter information of a point according to an embodiment of the present invention, such as Figure 4 As shown, the calculation of the occupancy probability of the spatial grid according to the filtering information of each point located in the spatial grid in the point cloud information may include the following steps.
[0054] In step S402, for each point located in the spatial grid in the point cloud information, the occupancy probability of the spatial grid corresponding to the point is calculated according to the position of the point.
[0055] Further, for each point located in the spatial grid in the point cloud information, calculating the occupancy probability of the spatial grid corresponding to the point according to the position of the point may include: for each point located in the spatial grid in the point cloud information The reciprocal of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More