

Calibration system and method for unmanned aerial vehicle semi-closed-loop control plane
A calibration system and calibration method technology, applied in the field of aviation support equipment, can solve the problems of affecting measurement accuracy, inconvenient on-site implementation, time-consuming and labor-consuming, etc., and achieve the effect of firm installation and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
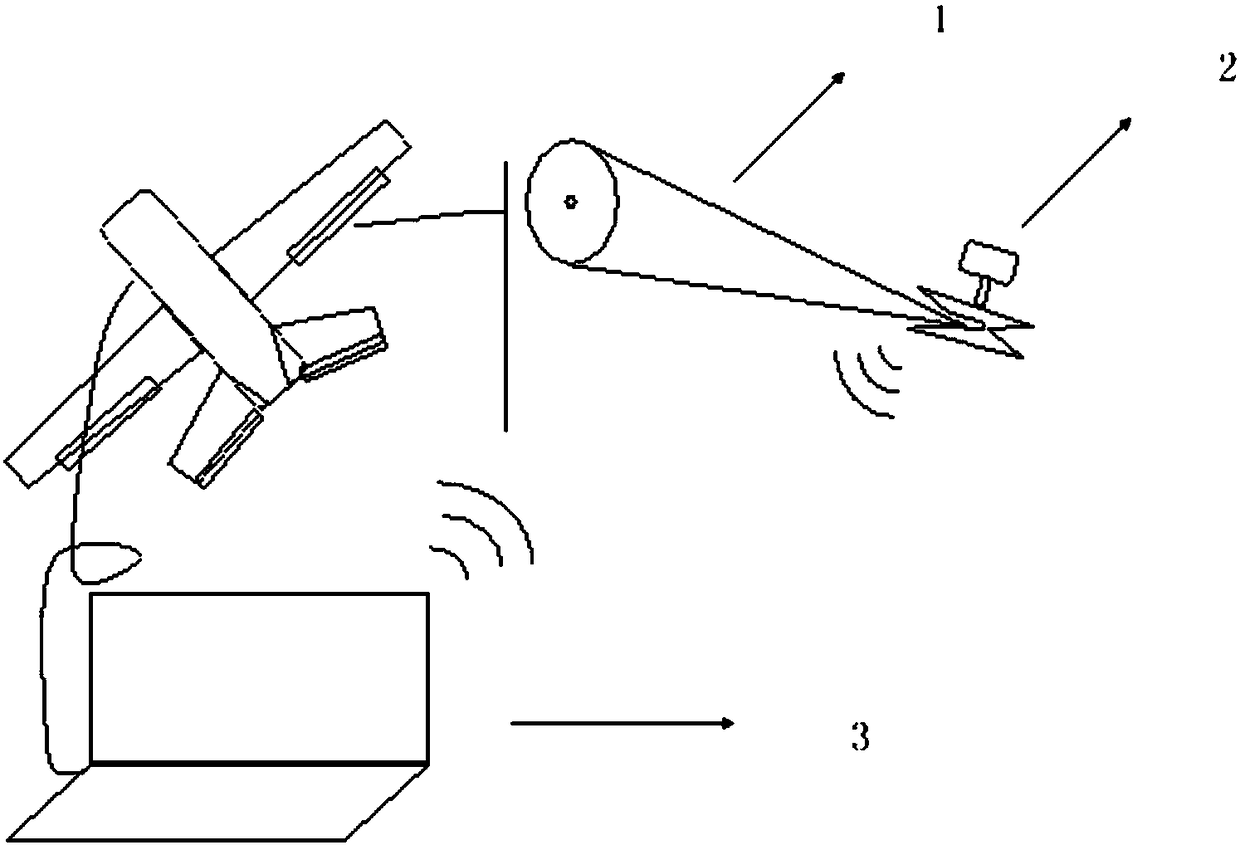
[0032] The invention relates to a calibration system and method for a semi-closed-loop rudder surface, belonging to the field of aviation support equipment. This method uses the axis (rotation axis) angle (rotation angle) factor of the quaternion method to measure the angular position of the rudder surface. Because the present invention has no requirement on its fixed position relative to the rudder surface, it has wide application range and high operability. This technology separates the angular position of the rudder surface from the factor of the rotational axis of the rudder surface, so the calibration of the rotational motion of the rudder surface is more convenient.
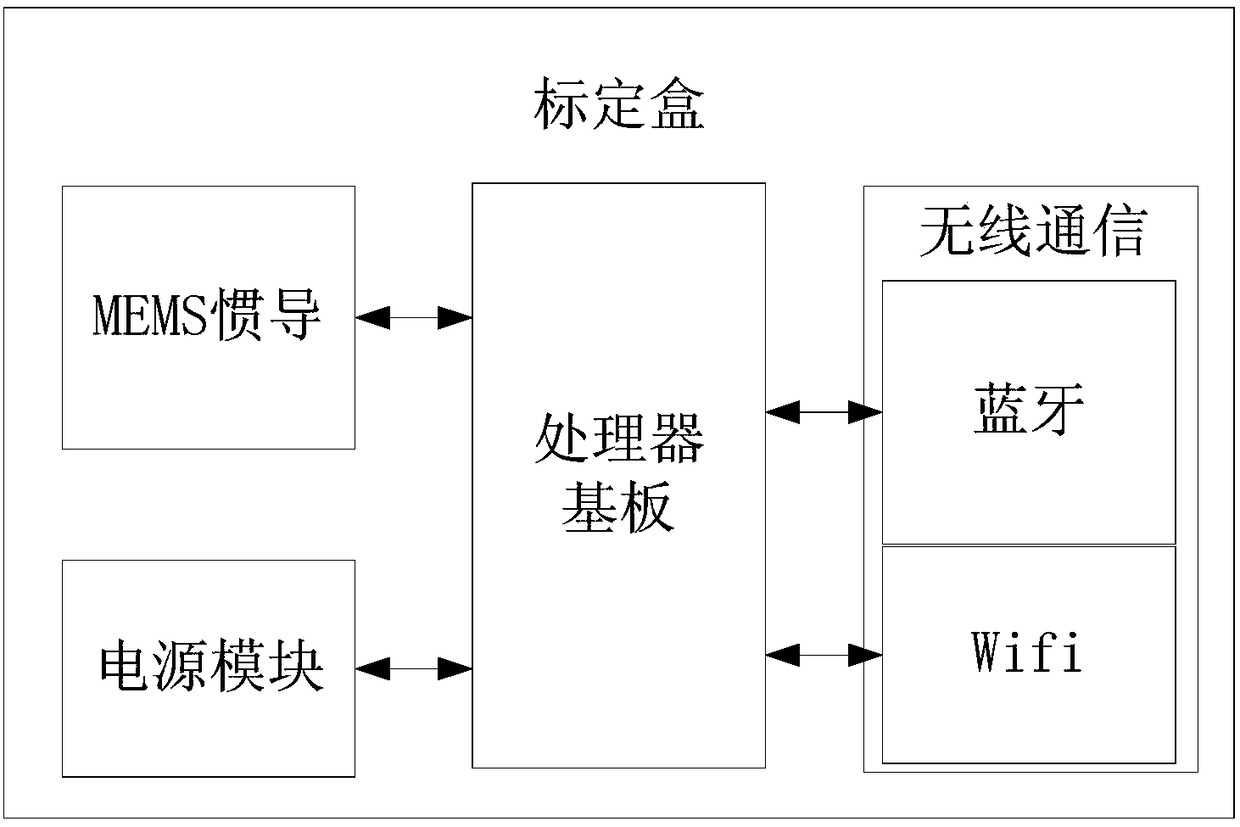
[0033] Such as figure 1 , 2 As shown, a kind of calibration system for the semi-closed-loop rudder surface of the UAV proposed by the present invention includes a ground control device, a clip and a calibration box, wherein the calibration box includes MEMS inertial navigation, a processor module and a wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More