

Equipment for transfer and/or handling and transport of workpieces
A workpiece and equipment technology, applied in the field of equipment for taking out injection molded articles from injection molding machines, can solve problems such as difficulty in grasping workpieces, production interruptions, production defects, etc., to save cable connections, improve resolution, The effect of simplifying replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
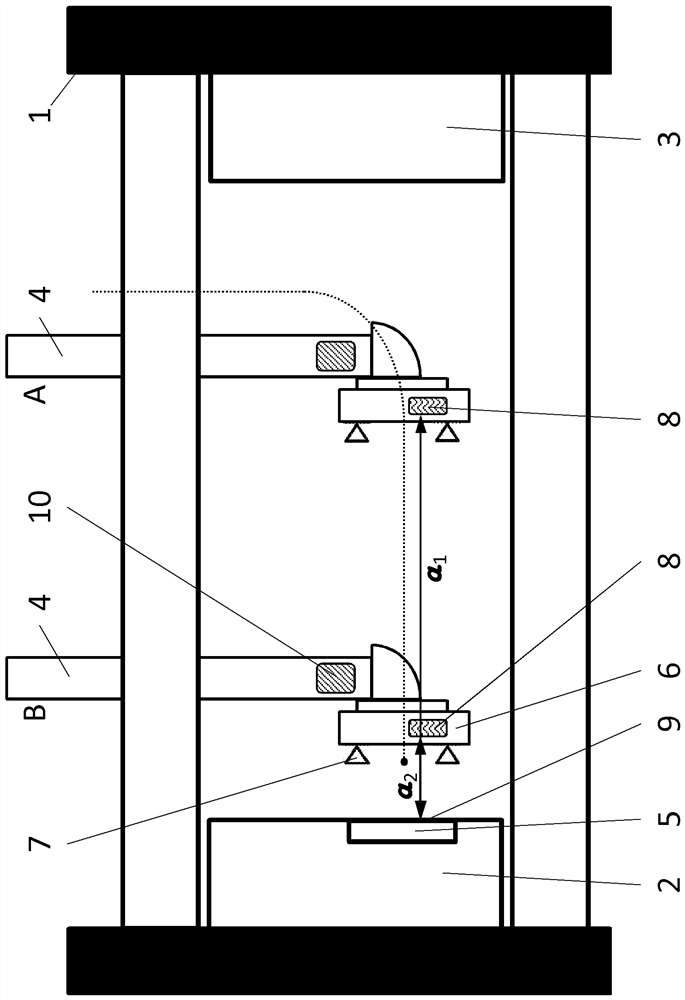
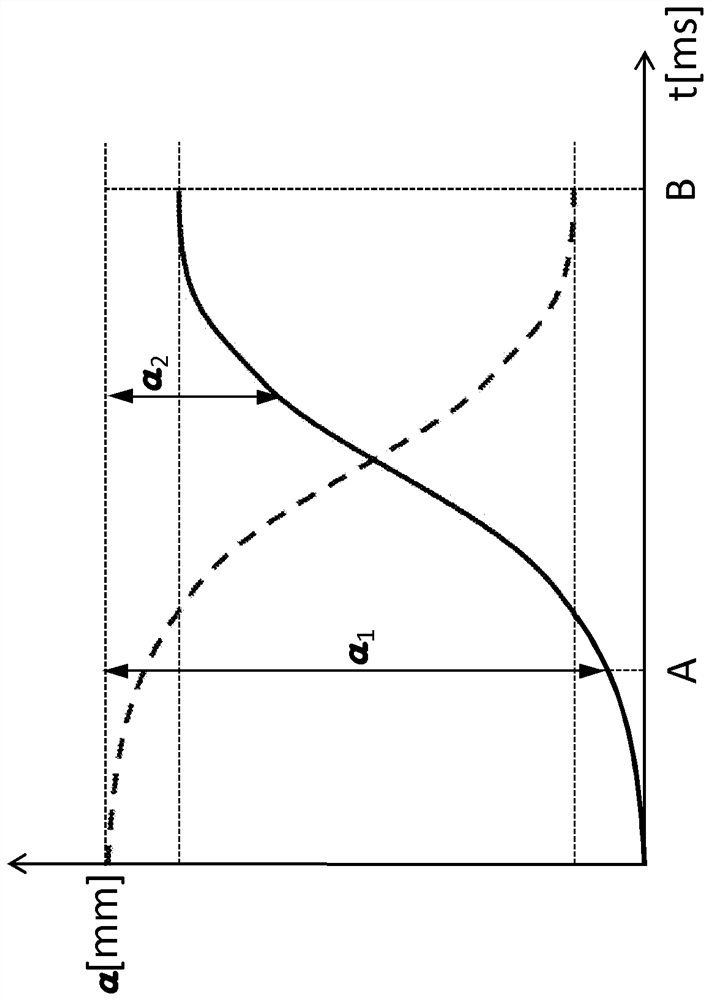
[0027] according to figure 1 The injection molding machine 1 is shown with the mold halves 2 , 3 open. The robot 4 enters the opened tool halves 2 , 3 for removal of the workpiece 5 . Position A of the robot 4 is entry into the open mold, wherein in position A the robot 4 has reached the point for releasing the measurement of the reference plane 9 .
[0028] In position B, the robot 4 is located in the region of the workpiece 5 .
[0029] The automatic manipulator 4 can be moved by means of a drive which can be acted upon by a programmable control and regulating unit. The robot 4 is provided with a gripper 6 and has at least one suction nozzle 7 . A programmable control and regulation unit 10 is provided in the robot 4 , which optionally has a separate sensor evaluation unit.
[0030] A distance measuring device 8, such as a TOF sensor, is arranged in the gripper 6 of the automatic manipulator 4, and the distance measuring device is used to detect the distance a from the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More