

Motion planning method and device for operability optimization of redundant manipulator
A technology of motion planning and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as limiting the operability of redundant manipulators, difficult to embed in the physical constraints of manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
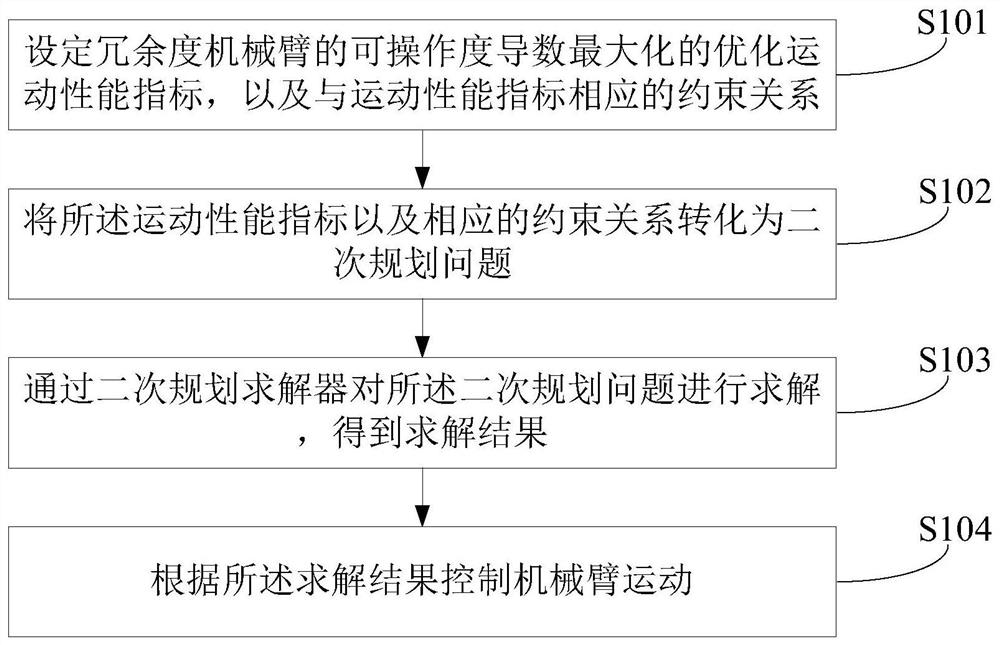
[0048] The purpose of the embodiments of the present invention is to propose a motion planning method for optimizing the operability of redundant manipulators, so as to solve the problem of optimizing the operability based on pseudo-inverse in the prior art, which is generally difficult to embed in various Physical constraints limit the operability of redundant robotic arms. Below in conjunction with accompanying drawing, this scheme is described further.
[0049] figure 1 It shows the implementation process of the motion planning method for the operability optimization of the redundant robotic a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More