Electric power-assisted steering system and steering wheel angle median self-learning method thereof
An electric power steering and steering wheel angle technology, applied in the automotive field, can solve problems such as increased driving risks, increased labor costs, loss of life and property, etc., to improve safety performance and operating comfort, save manpower and material resources, and save time and cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
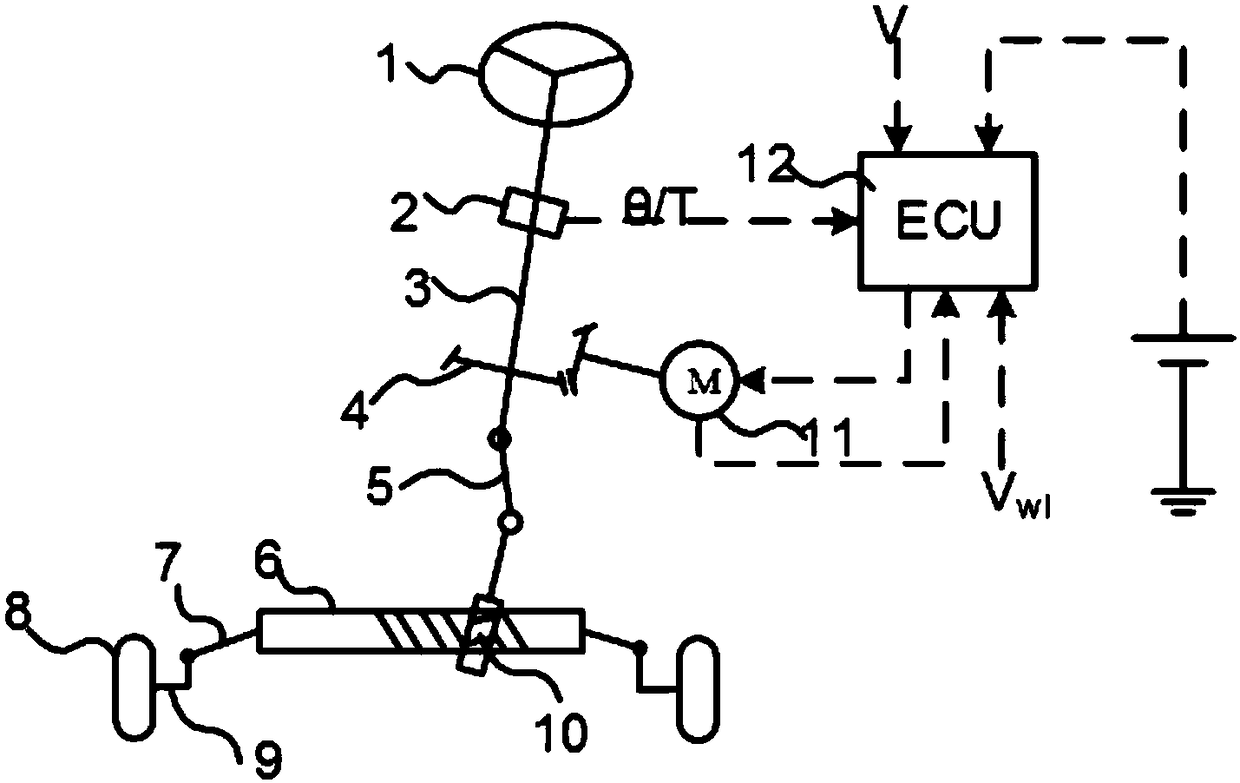
[0059] The electric power steering system provided by the present invention has the function of self-learning the center of the steering wheel angle, and the self-learning of the center of the steering wheel angle adopts the following methods:
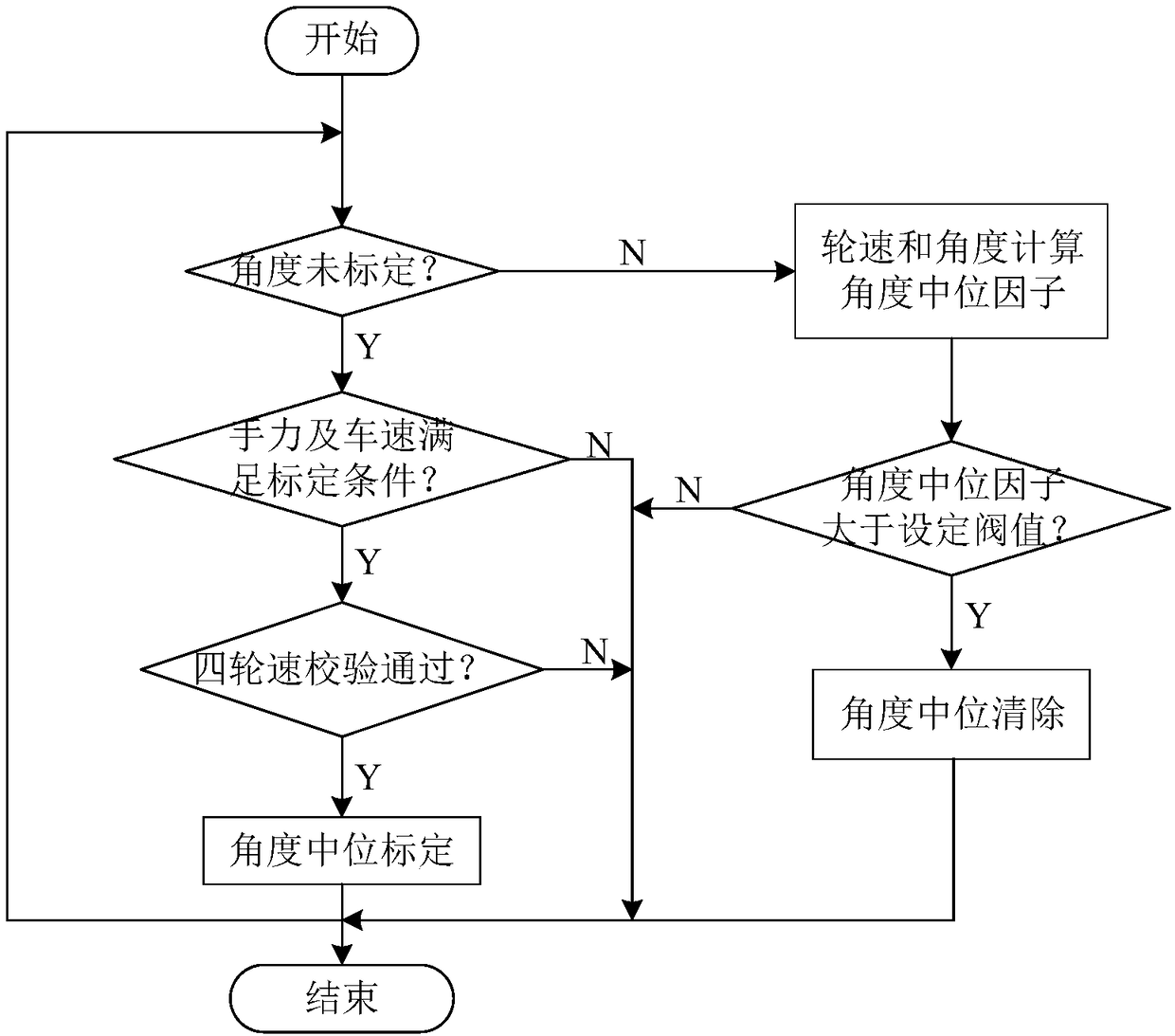
[0060] When the steering wheel hand force SteeringTorque is within the first preset hand force range ST_Thre, and the vehicle speed VehicleSpeed is greater than the first vehicle speed threshold VS_Thre for the first preset time length CaliReq_Time, a calibration request CaliReq is issued; before wheel speed comparison, each wheel The wheel speed is filtered.
[0061] If the calibration state of the neutral steering wheel angle, CaliState, is uncalibrated, the difference between the sum of the wheel speeds of the two diagonal wheels is less than the first wheel speed threshold DiagonalVlcty_Thre, and the wheel speed difference between the two driving wheels is less than the second wheel speed threshold DrvnVlcty_Thre Continue for the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com