Map construction and navigation method, device, and system
A map construction, map technology, applied in the field of data processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] This embodiment relates to a map construction method and system.
[0049] The map construction method of this embodiment is implemented by a map construction system. In the application of mobile robot navigation, the map construction system can be embedded in the navigation chip used by the mobile robot, or integrated with the visual sensor used by the mobile robot, or adopt implemented on a separate chip. In other applications, it is similar.
[0050] The map in this embodiment takes an indoor grid map as an example, but the present application is not limited thereto, and the obstacle classification method can also be extended to outdoor maps, non-grid maps, and the like.
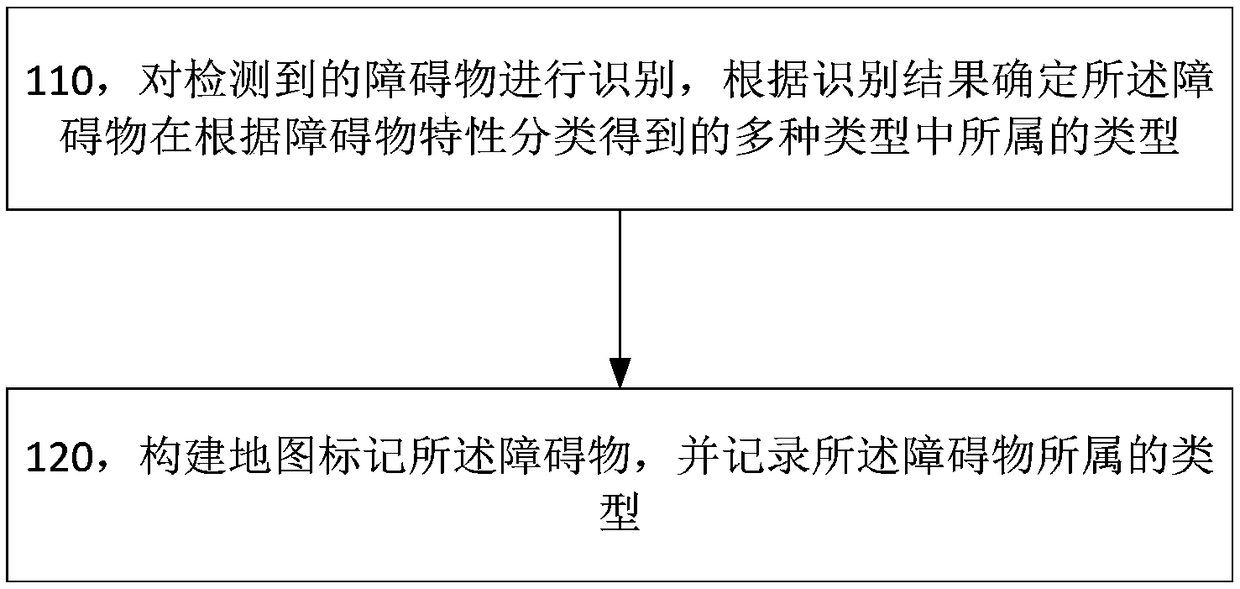
[0051] The map construction method of this embodiment is as follows figure 1 shown, including:
[0052] Step 110, identifying the detected obstacle, and determining the type of the obstacle among the various types classified according to the characteristics of the obstacle according to the identifi...
Embodiment 2
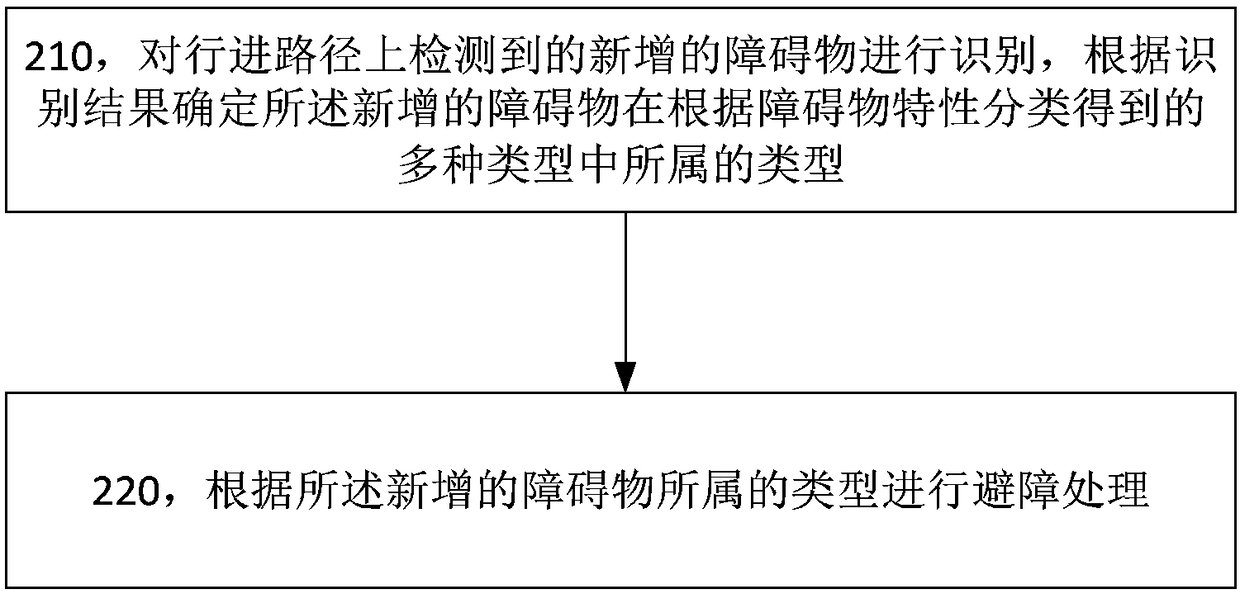
[0150] This embodiment provides a navigation method, such as image 3 As shown, it includes: step 210, identifying the newly added obstacle detected on the travel path, and determining the type of the newly added obstacle among the multiple types classified according to the characteristics of the obstacle according to the recognition result; Step 220, perform obstacle avoidance processing according to the type of the added obstacle.
[0151] In this example,
[0152] The methods of classification according to the characteristics of obstacles include negotiation type and other types, negotiation type obstacles include adults, and other types may be stable type, sudden change type, etc., but in this embodiment, other types are not limited. In this embodiment, obstacle avoidance processing is performed according to the type of the newly added obstacle, including: if the newly added obstacle is a negotiation obstacle, initiate an interaction with the negotiation obstacle, and req...
Embodiment 3
[0169] This embodiment uses an example to describe the grid map construction process based on indoor obstacle feature classification. Before the navigation task starts, the mobile robot walks around the indoor environment and completes the construction of the static map layer according to the information of external sensors. Since this stage occurs before the navigation task of the mobile robot, the obstacles in the static map layer are all stable obstacles;
[0170] Such as Figure 5 As shown, the process includes:
[0171] Step 301, start a navigation task;
[0172] Step 302, finding an obstacle;
[0173] In this step, the map construction system detects the images collected by the sensor and finds that new obstacles appear ahead;
[0174] Step 303, obstacle image recognition,
[0175] In this step, the map construction system performs feature extraction and recognition based on the image information of the obstacle, such as recognizing that the obstacle ahead is a cat o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com