

Body-sensing glove of finger joint curvature measurement
A joint bending and glove technology, applied in the field of human-computer interaction, can solve the problems of inability to directly measure the bending degree of fingers, inability to identify the degree of slight bending, and high measurement environment requirements, and achieve a good user interaction experience, simple structure, and accurate measurement position. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to facilitate the understanding of those skilled in the art, the structural principles of the present invention will be further described in detail below in conjunction with specific embodiments and accompanying drawings.
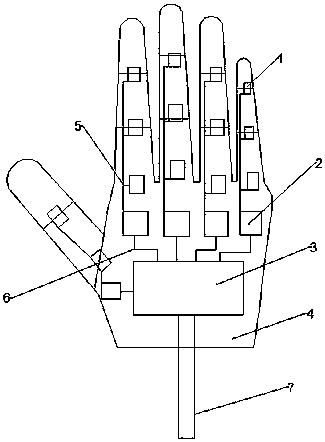
[0016] Such as figure 1 As shown, a somatosensory glove for measuring finger joint curvature includes a micro angle sensor 1, an A / D converter 2, an STM32 processor 3, a glove body 4, an analog data bus 5, a digital data bus 6 and an external data line 7; The miniature angle sensor 1, the A / D converter 2 and the STM32 processor 3 are all attached to the glove body 4; the A / D converter 2 is connected with the miniature angle sensor 1 and the STM32 processor 3 respectively; the STM32 The processor 3 is connected to the peripheral device through the external data line 7 .
[0017] Such as figure 1 As shown, the resistance of the miniature angle sensor 1 changes with the rotation of the finger joint, thereby changing the magnitude of the curre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More