Self-propelled cleaning device, control method for self-propelled cleaning device, and program
A technology of cleaning device and control method, which is applied in two-dimensional position/channel control, installation of electrical equipment, etc., and can solve problems such as insufficient cleaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
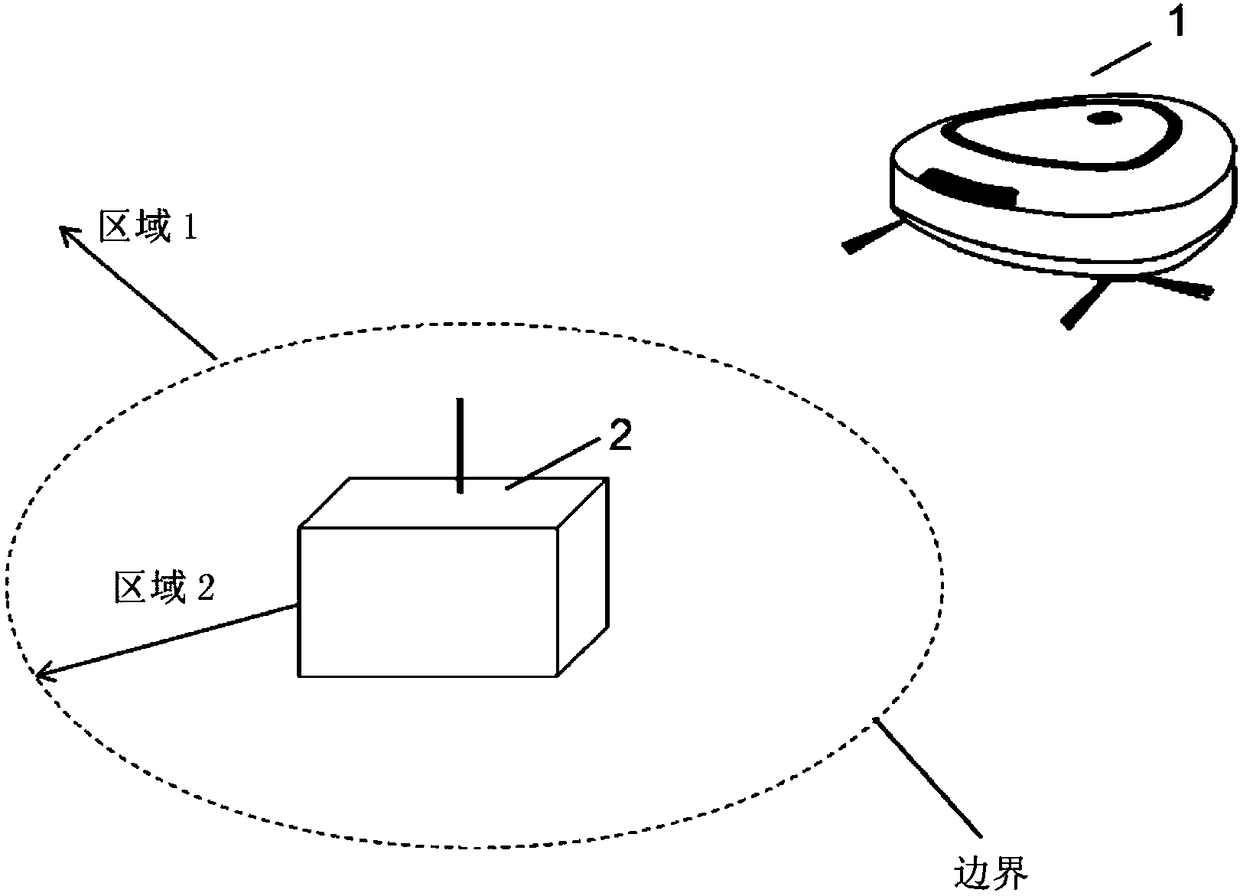
[0026] figure 1 It is a figure for demonstrating the relationship of the area|region 1, area|region 2, and a boundary in Embodiment 1.
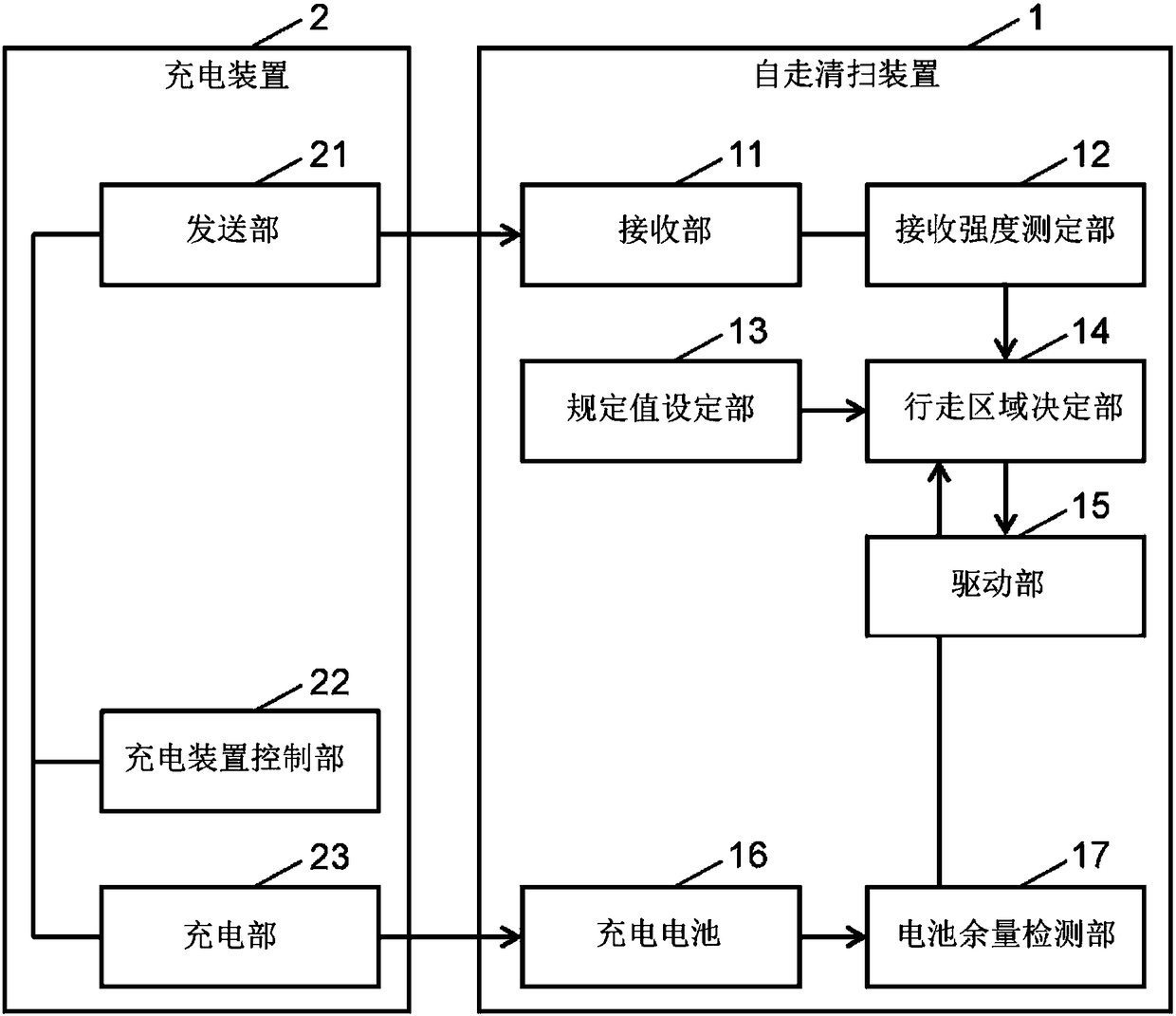
[0027] Self-propelled cleaning device 1 is with rechargeable battery 16 (referring to image 3 ) is the power source and performs the cleaning function while autonomously walking. In addition, electric power is supplied from the charging device 2 to charge the rechargeable battery 16 . The self-propelled cleaning device 1 is, for example, a cleaning robot.
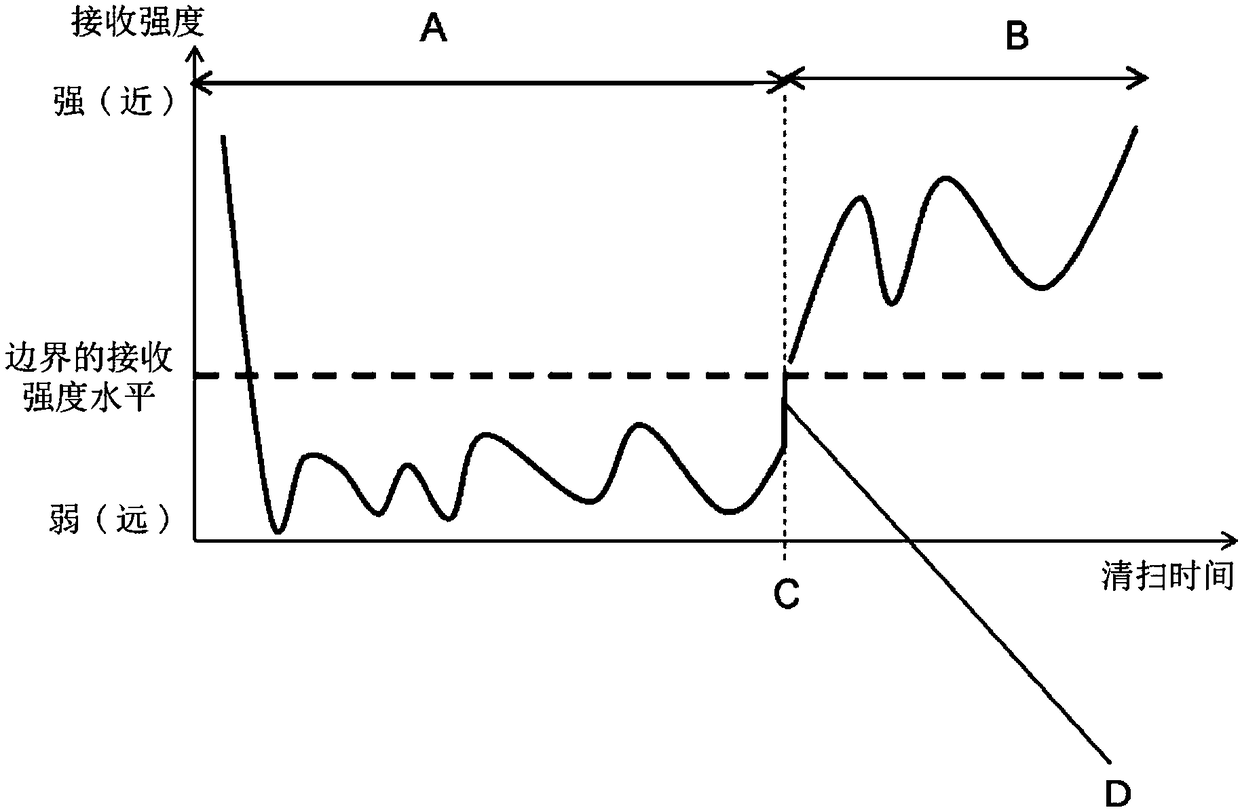
[0028] The charging device 2 transmits wireless signals such as infrared signals or radio signals. The self-propelled cleaning device 1 receives a signal transmitted from the charging device 2 and measures the reception strength. The self-propelled cleaning device 1 compares the reception strength of the signal received from the charging device 2 with a preset reception strength level.
[0029] Hereinafter, for easy understanding, the preset reception intensity level and the receptio...
Embodiment approach 2
[0075] The self-propelled cleaning device 101 of Embodiment 2 differs from the self-propelled cleaning device 1 of Embodiment 1 in the points described below, and has substantially the same configuration as the self-propelled cleaning device 1 of Embodiment 1 about other points. In addition, in the description of the self-propelled cleaning device 101 of Embodiment 2, the same reference numerals are assigned to the same configuration as that of the self-propelled cleaning device 1 of Embodiment 1, and a part or all of the description of the configuration is omitted.
[0076] Figure 7 It is a figure for demonstrating the relationship of the area|region 1, area|region 2, and a boundary in Embodiment 2.
[0077] Similar to Embodiment 1, the self-propelled cleaning device 101 performs a cleaning function while self-propelled using the rechargeable battery 16 as a power source. In addition, the rechargeable battery 16 is charged from the charging device 2 . The self-propelled cl...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap