

Vision tracking mobile robot based on WIFI auxiliary positioning and control method
A mobile robot and visual tracking technology, applied in the field of mobile robots, can solve problems such as limitations, and achieve the effect of improving positioning accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
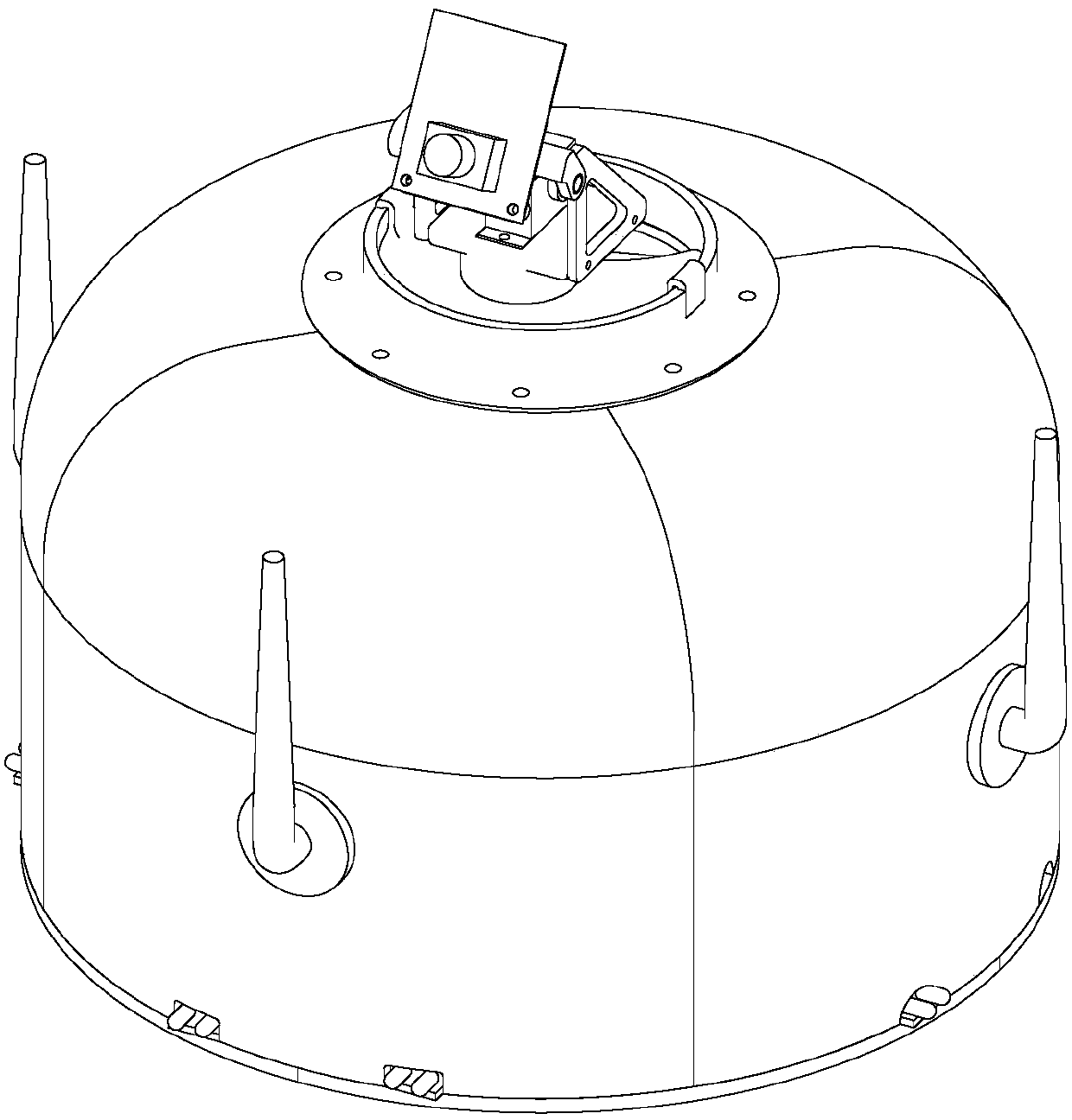
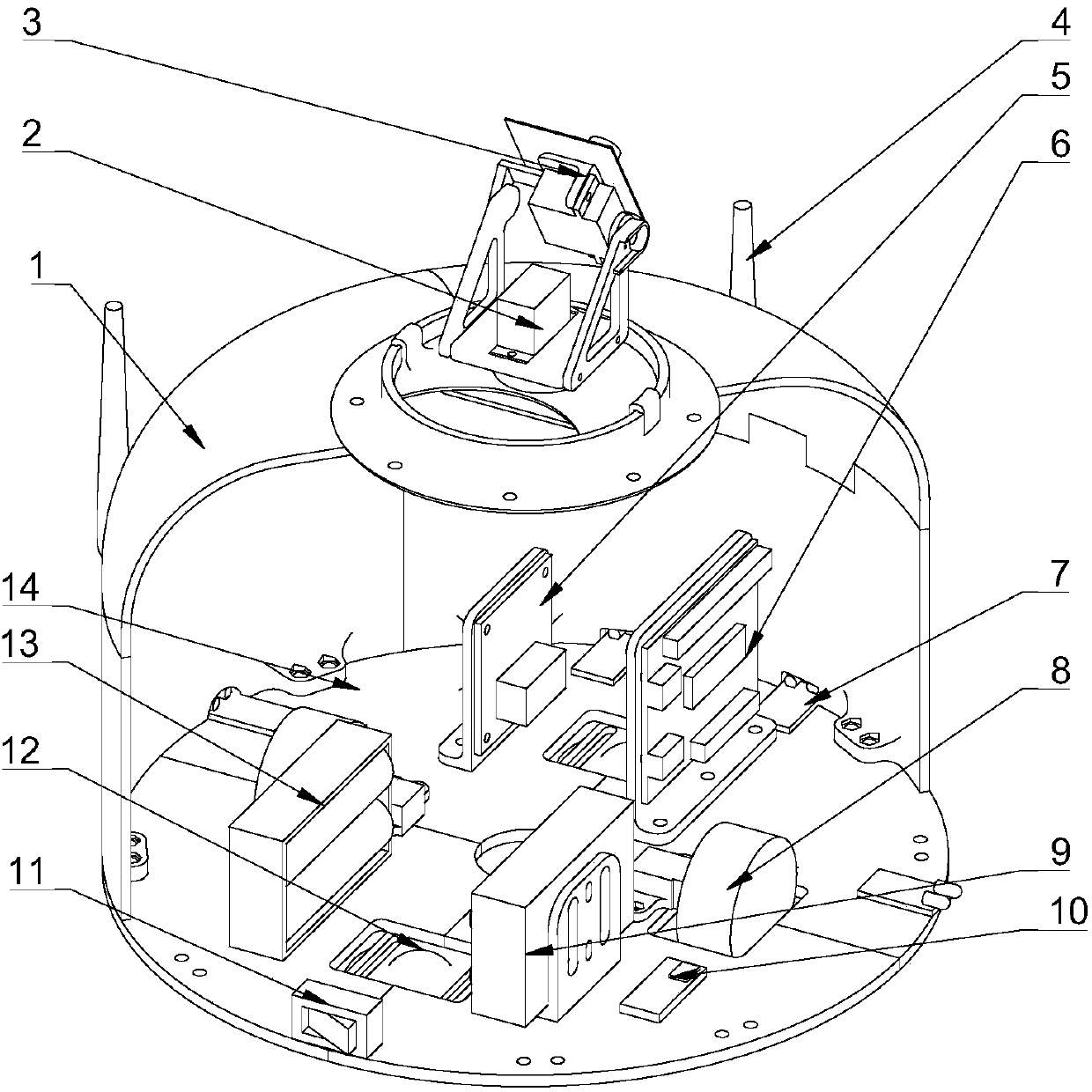
[0042] Such as Figure 1-2 As shown, a visual tracking mobile robot based on WIFI-assisted positioning includes a robot housing 1, a steering gear pan / tilt 2, a vision module 3, a WIFI-AP module 4, a driver 5, a control module 6, an infrared module 7, and a drive motor 8. Right power supply 9, Bluetooth module 10, switch 11, universal wheels 12, left power supply 13, chassis 14. in:
[0043] The robot shell 1 is composed of four petals. The WIFI-AP module 4 is installed on the front of the robot shell 1; the steering gear pan / tilt 2 is installed on the upper part of the robot shell 1; the vision module 3 is installed on the steering Side power supply 9 supplies power; WIFI-AP module 4, driver 5, control module 6, infrared module 7, drive motor 8, bluetooth module 10, are powered by left side power supply 13, described switch 11, bluetooth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More