

Multifunctional multi-legged bionic robot system on basis of pneumatic systems
A bionic robot and pneumatic system technology, applied in the field of multi-functional multi-legged bionic robot system, can solve the problems of easy failure, complex structure, difficult to control structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below according to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
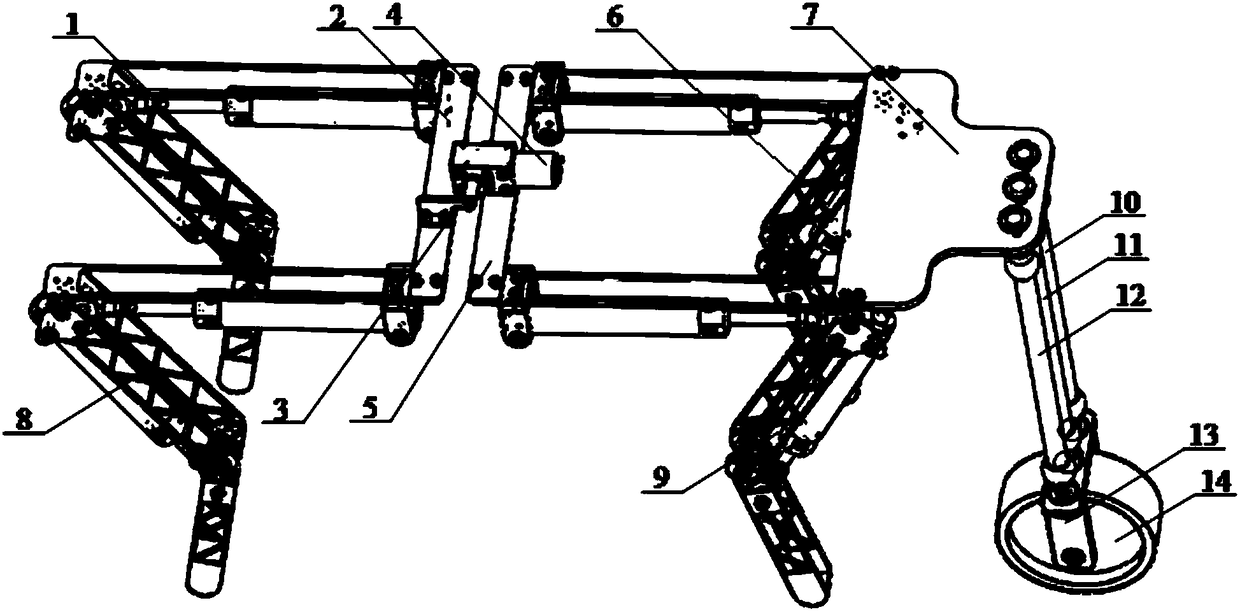
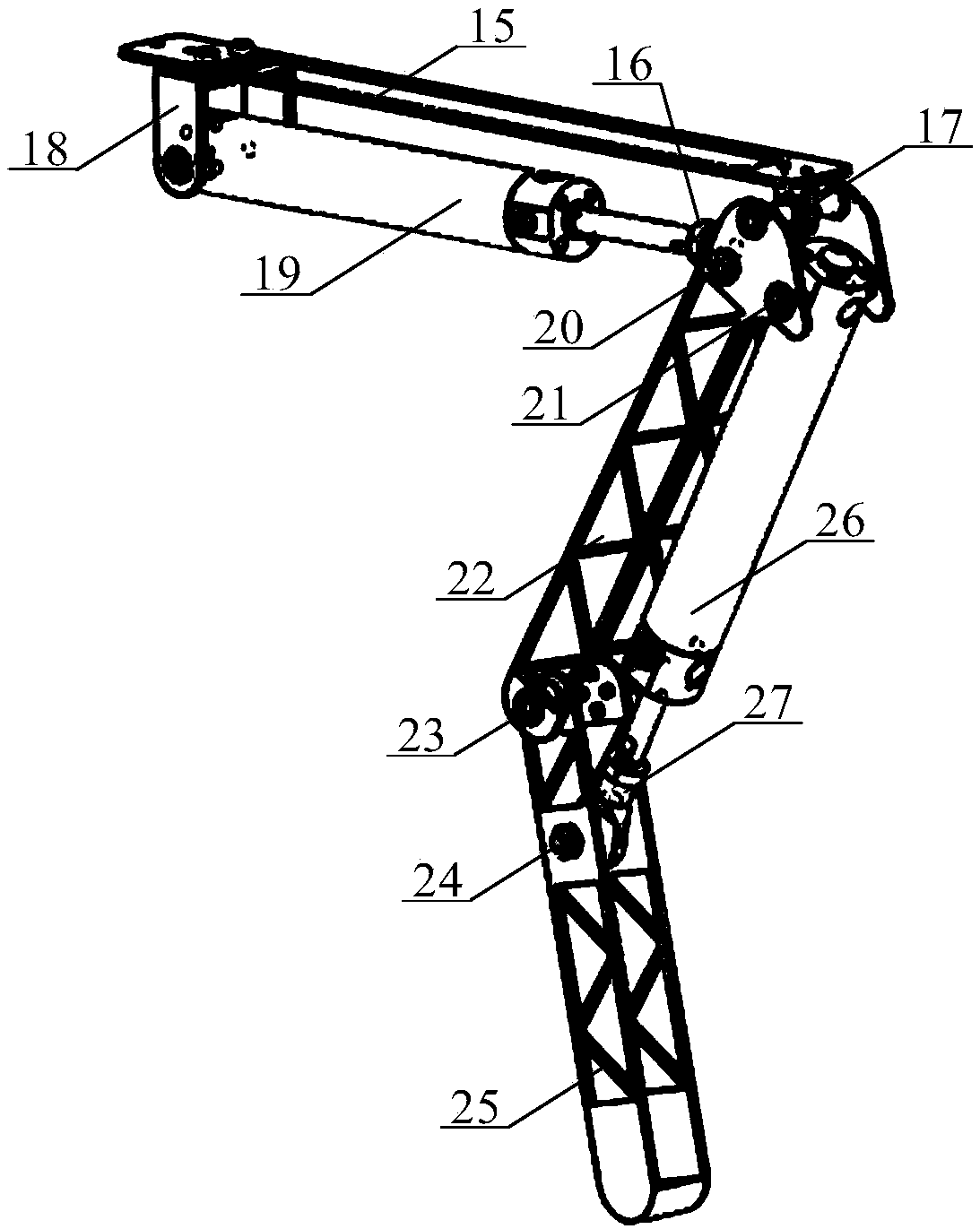
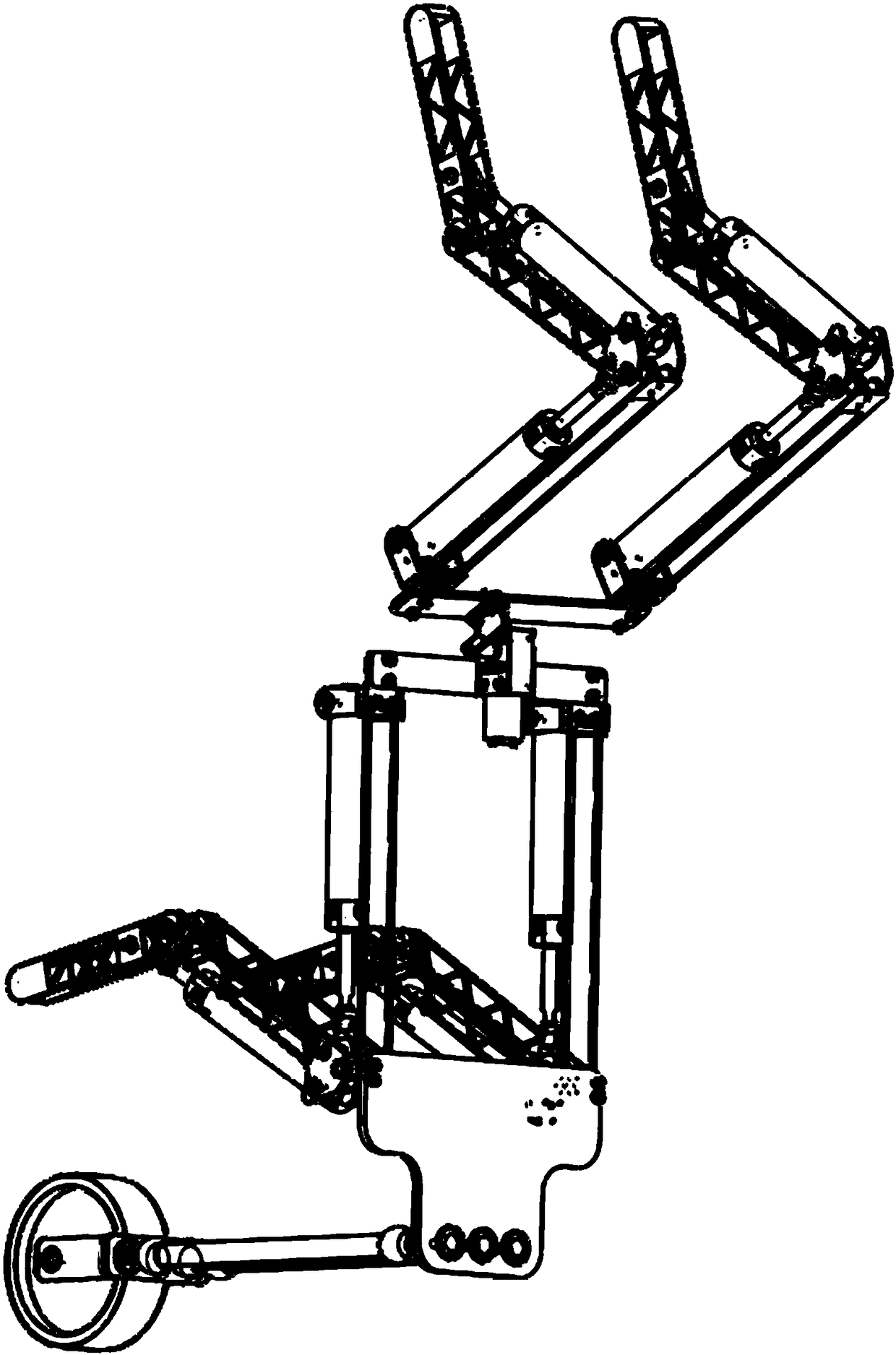
[0021] Such as figure 1 , 2 , shown in 3, a kind of multi-functional multi-legged bionic robot system based on pneumatic system comprises: outrigger one 1, connection board one 2, connection board two 3, motor 4, connection board three 5, outrigger two 6, pneumatic muscles Connecting plate 7, outrigger three 8, outrigger four 9, pneumatic muscle one 10, pneumatic muscle two 11, pneumatic muscle three 12, wheel support frame 13, wheel 14, outrigger fixing plate 15, rod end joint bearing one 16, Connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More