

Electro-tactile feedback device and surgical robot provided with same
A feedback device and electro-tactile technology, applied in the field of surgical robots, can solve the problems of judgment affecting the accuracy of operation, not intuitive enough, etc., and achieve the effect of improving accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below, the present invention will be described in further detail in conjunction with the accompanying drawings.
[0021] Based on the fact that the most advanced surgical robots at home and abroad have not yet added force feedback technology, the inventor has done in-depth research on the tactile feedback technology of surgical robots and proposed the present invention.
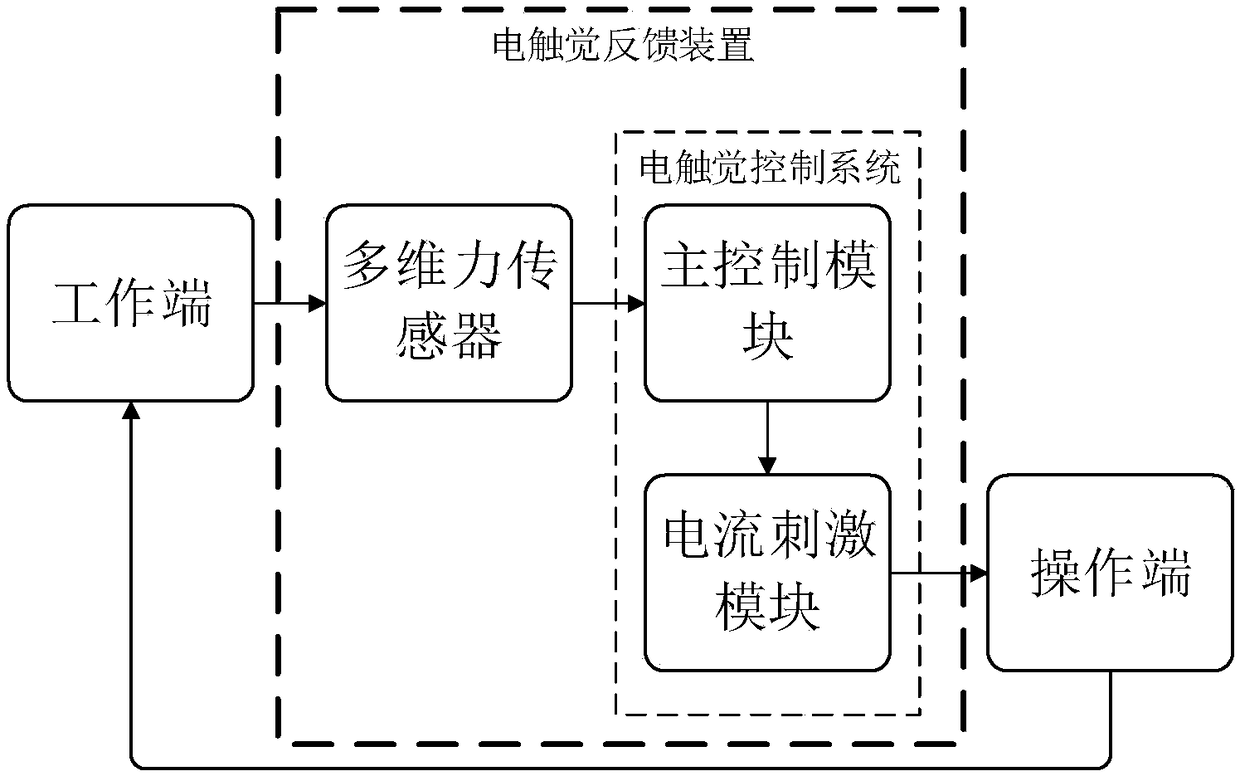
[0022] Such as figure 1 As shown, a surgical robot includes a working end acting on diseased tissue and an operating end used by the surgeon. In order to effectively improve the accuracy and stability of surgical operations, the surgical robot is also equipped with an electric tactile feedback device. The electric tactile feedback device includes a multi-dimensional force sensor 100 and an electric tactile control system. The multi-dimensional force sensor 100 is arranged on the working end, and is used to capture the force information of the working end, and output the force information of the worki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More